An incredibly precise 9DoF orientation sensor featuring 14-bit accelerometer fusion, Interactive Calibration, and flexible I2C, SPI, or UART communication options.
Special Order
Shipping from $9.90
+138 more from our supplier in 7-10 days
Our Code: SKU-010157
Supplier Link: [SparkFun MPN:22857]
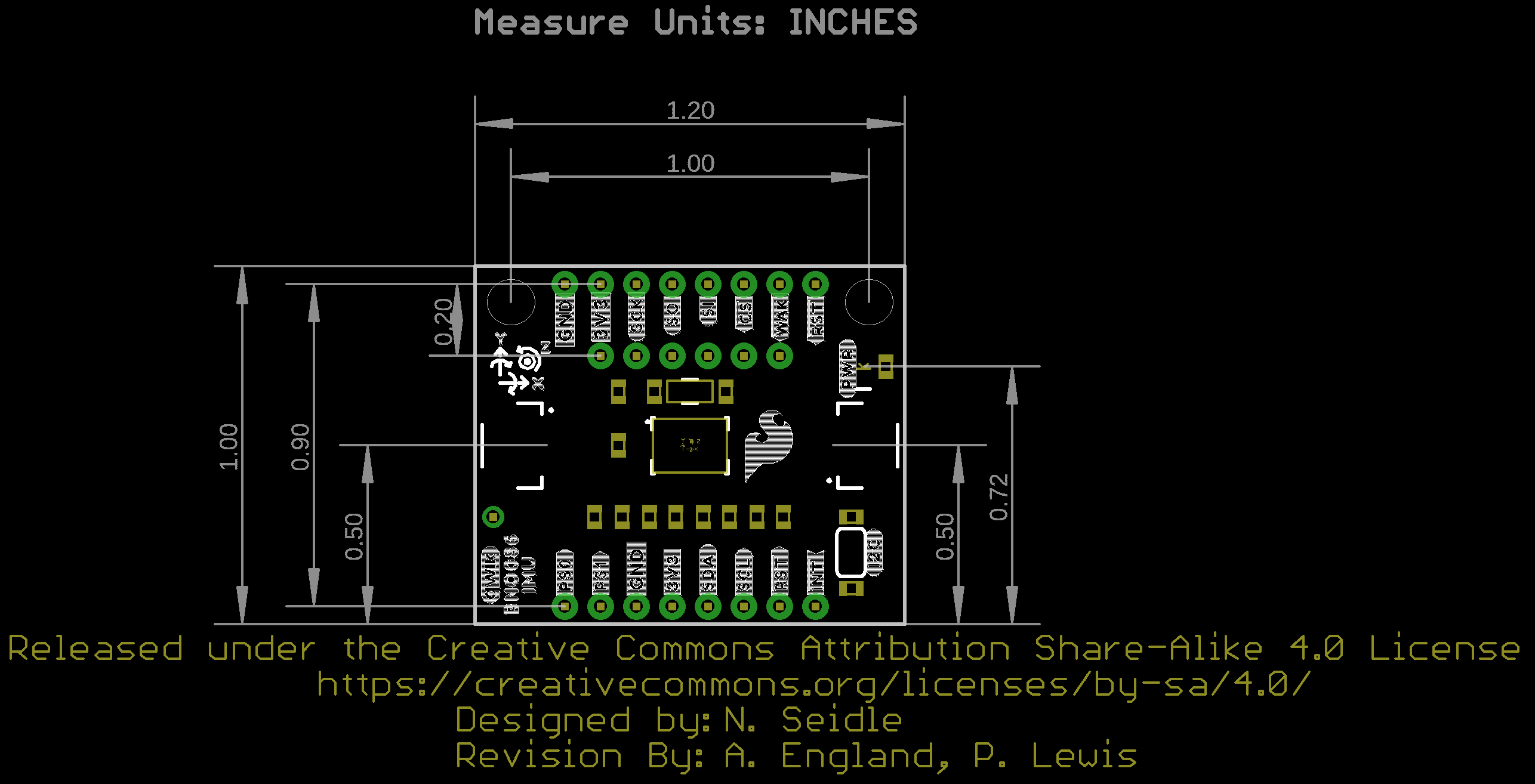
The SparkFun VR IMU Breakout provides an incredibly accurate orientation sensor, opening the door to virtual reality development without requiring you to drop hundreds, or even thousands, of dollars just to gain access to the underlying hardware. At its heart lies CEVA®’s BNO086, a combination triple-axis accelerometer, gyroscope, and magnetometer System in Package (SiP) driven by a built-in 32-bit ARM© Cortex™ M0+ processor.
This Inertial Measurement Unit (IMU) processes all the raw sensor data on the chip itself, providing you with combined, drift-corrected, and meaningful orientation information immediately after activation.
This IMU breakout board is equipped with two I2C Qwiic connectors, making interfacing with the tiny QFN package incredibly easy. As part of SparkFun’s Qwiic connect system, you won’t have to solder to get your sensor up and running. However, we have still broken out the standard 0.1-inch-spaced pins if you prefer to prototype on a breadboard.

Because of the capabilities this sensor is capable of, it comes with a complex interface that provides multiple ways to communicate:
To help you get started as quickly as possible, we have written an extensive I2C-based library that easily outputs the rotation vector, acceleration, gyro, and magnetometer readings you need. Whether you are building custom VR hardware or deploying a robotic navigation system, the SparkFun VR IMU Breakout provides the precise motion data your project demands.


































{kind=link}