This high-power, 130-size brushed DC motor can be used as a direct replacement for lower-power 130-size motors to get more torque and speed out of your gearmotor, but it will also draw more current and typically wear out faster.
This brushed DC motor is great for applications where you want a lot of power in a small package. We generally recommend running it between 1.5 V and 3 V, but it can operate at higher voltages to provide more power in exchange for longevity of the motor. For example, at 6 V, the speed and torque are approximately twice what they are at 3 V, but it will also draw twice as much current, and it will have a shorter life. In our tests, the motor was able to run continuously at 6 V for approximately five hours before failure.
This motor is a generic alternative to the Solarbotics RM2 motor, offering nearly identical performance in the same form factor. It can be used to provide more speed and torque to gearmotors driven by lower-power 130-size motors, such as our larger Pololu plastic gearmotors (228:1 offset, 120:1 offset, 200:1 90-degree, and 120:1 90-degree) and Solarbotics plastic gearmotors (GM2, GM3, GM8, and GM9). Some people have even been using motors like this to enhance their flywheel NERF guns!
| Size: | 25 × 15 × 20 mm |
|---|---|
| Weight: | 16 g |
| Shaft diameter: | 2 mm |
| Free-run speed @ 6V: | 30000 rpm |
|---|---|
| Free-run current @ 6V: | 330 mA |
| Stall current @ 6V: | 7200 mA |
| Stall torque @ 6V: | 1.5 oz·in |
| Free-run speed @ 3V: | 17000 rpm |
| Free-run current @ 3V: | 250 mA |
| Stall current @ 3V: | 3600 mA |
| Stall torque @ 3V: | 0.75 oz·in |
No; the information we have available for this motor can be found on its product page. However, you can approximate various additional motor parameters from the information found in the “Specs” tab.
The electrical resistance of the motor can be approximated by dividing the rated voltage by the stall current (at the rated voltage). The electromotive force constant (Ke) can be approximated by dividing the rated voltage by the free-run speed (at the rated voltage). To approximate the motor torque constant (Kt), you can divide the stall torque by the stall current.
For pretty much any DC motor, the current, speed, power, and efficiency curves as a function of torque will look like those in the graph below (assuming motor voltage and temperature are constant):
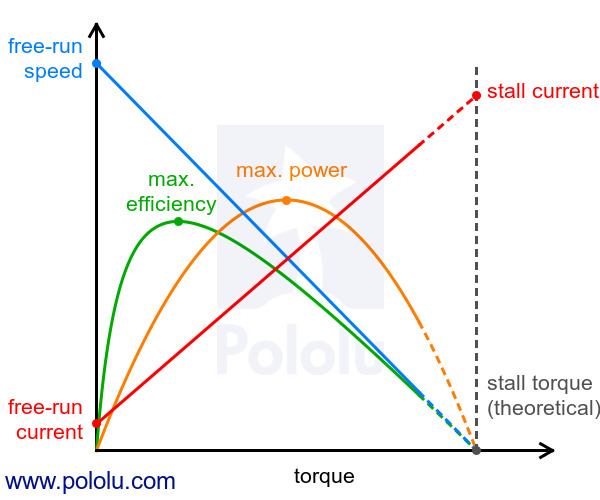 |
The current and speed curves are approximately linear, and the product pages for our motors provide the approximate end points for these lines: (0 torque, no-load current) and (stall torque, stall current) for the red line, and (0 torque, no-load speed) and (stall torque, 0 speed) for the blue line.
The orange output power curve is the product of the speed and the torque, which results in an inverted parabola with its peak at 50% of the stall torque.
The green efficiency curve is the output power divided by the input power, where the input power is current times voltage. The voltage is constant, so you can divide the output power curve by the current line to get the general shape of the efficiency curve, which in turn lets you identify the torque, speed, and current that correspond to max efficiency.
There are many programs out there that you can use to generate these curves. For example, if you have access to MATLAB, you can use this customer-created MATLAB script to generate these motor plots for you from the specifications we provide for each gearmotor.
Note: A good general rule of thumb is to keep the continuous load on a DC motor from exceeding approximately 20% to 30% of the stall torque. Stalling gearmotors can greatly decrease their lifetimes, occasionally resulting in immediate damage to the gearbox or thermal damage to the motor windings or brushes. Do not expect to be able to safely operate a brushed DC gearmotor all the way to stall. The safe operating range will depend on the specifics of the gearmotor itself.