This gearmotor is a powerful brushed DC motor with 70:1 metal gearbox intended for operation at 12 V. These units have a 0.61"-long, 6 mm-diameter D-shaped output shaft. This gearmotor is also available with an integrated encoder .
This powerful brushed DC gearmotor is available in six different gear ratios. Versions with an integrated quadrature encoder are also available, including just the motor and encoder portion by itself (no gearbox).
| Gear Ratio | No-Load Speed @ 12 V |
Stall Torque @ 12 V |
Stall Current @ 12 V |
 With Encoder |
 Without Encoder |
|---|---|---|---|---|---|
| 1:1 | 11,000 RPM | 5 oz-in | 5 A | motor without gearbox | |
| 19:1 | 500 RPM | 84 oz-in | 5 A | 37Dx68L mm | 37Dx52L mm |
| 30:1 | 350 RPM | 110 oz-in | 5 A | 37Dx68L mm | 37Dx52L mm |
| 50:1 | 200 RPM | 170 oz-in | 5 A | 37Dx70L mm | 37Dx54L mm |
| 70:1 | 150 RPM | 200 oz-in | 5 A | 37Dx70L mm | 37Dx54L mm |
| 100:1 | 100 RPM | 220 oz-in | 5 A | 37Dx73L mm | 37Dx57L mm |
| 131:1 | 80 RPM | 250 oz-in | 5 A | 37Dx73L mm | 37Dx57L mm |
Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
These motors are intended for use at 12 V, though in general, these kinds of motors can run at voltages above and below the nominal voltage (they can begin rotating at voltages as low as 1 V). Lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor.
Exact gear ratio: ``(25×30×28×40) / (10×10×12×10) =bb(70:1)``
April 2014 update: We have changed the gear ratio in this product’s name from “67:1” to “70:1” so the name more accurately reflects the product. The product itself has not changed.
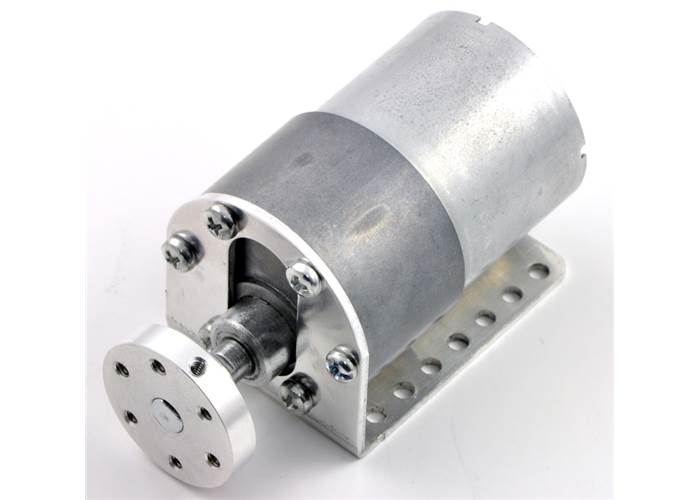
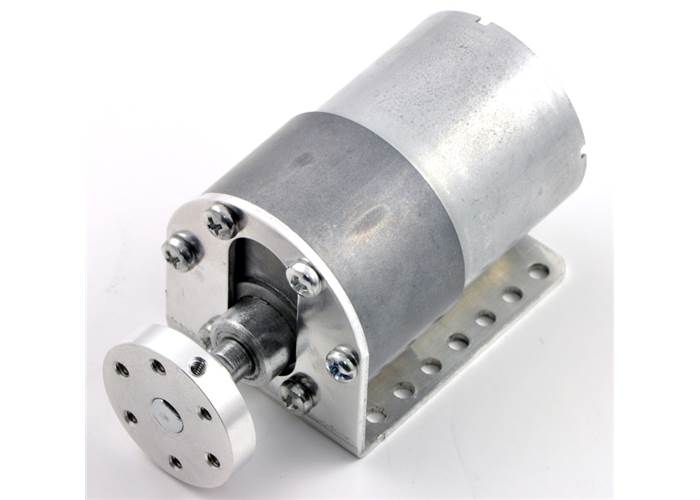
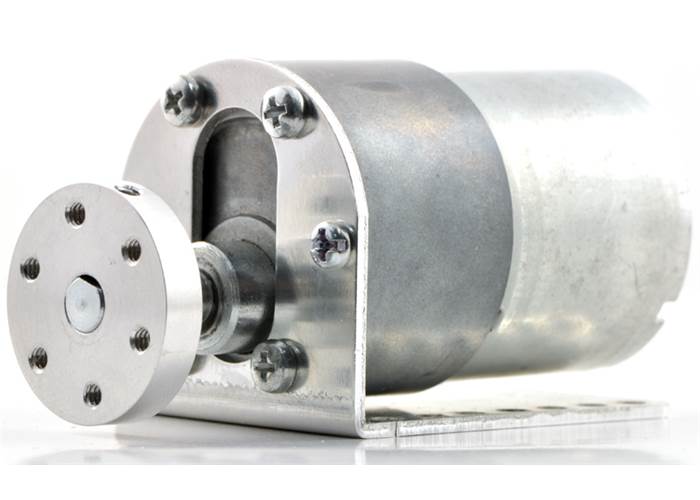
The face plate has six mounting holes evenly spaced around the outer edge threaded for M3 screws. These mounting holes form a regular hexagon and the centers of neighbouring holes are 15.5 mm apart. We carry two brackets for these gearmotors: a stamped aluminium L-bracket (sold in pairs) and a sturdier, tombstone-style machined aluminium bracket (sold individually):
Gearmotor with bracket and hub (1) |
Pololu machined aluminum bracket for 37D mm metal gearmotors mounting a motor to a clear piece of acrylic |
The 6 mm diameter gearbox output shaft works with the Pololu universal aluminium mounting hub for 6mm shafts, which can be used to mount our larger Pololu wheels (80mm- and 90mm-diameter) or custom wheels and mechanisms to the gearmotor’s output shaft as shown in the left picture below. Alternatively, you could use our 6mm scooter wheel adaptor to mount many common scooter, skateboard, and inline skate wheels to the gearmotor’s output shaft as shown in the right picture below:
Black Pololu 90x10mm wheel on a Pololu 37D mm metal gearmotor |
A 37D mm gearmotor connected to a scooter wheel by the 6 mm scooter wheel adapter |
Finally, our 12mm hex wheel adaptor for 6mm shaft (also available in an extended version) lets you use these motors with many common hobby RC wheels, including Dagu Wild Thumper Wheels:

12mm Hex Wheel Adapter for 6mm Shaft connecting a Wild Thumper Wheel to a 37D mm Metal Gearmotor
![Dimensions of the 37D mm metal gearmotor (without encoder). Units are mm over [inches]](/cache/files/productimageoriginals/13254_dimensions_of_the_37d_mm_metal_gearmotor_without_encoder_units_are_mm_over_inches_.jpg)
Dimensions of the 37D mm metal gearmotor (without encoder). Units are mm over [inches]
This diagram is also available as a downloadable PDF (277k pdf).
Warning: Do not screw too far into the mounting holes as the screws can hit the gears. We recommend screwing no further than 3mm (1/8") into the screw hole.
 |
| 37D mm metal gearmotor next to a micro metal gearmotor for size comparison. |
|---|
We offer a wide selection of metal gearmotors that offer different combinations of speed and torque. Our metal gearmotor comparison table can help you find the motor that best meets your project’s requirements.
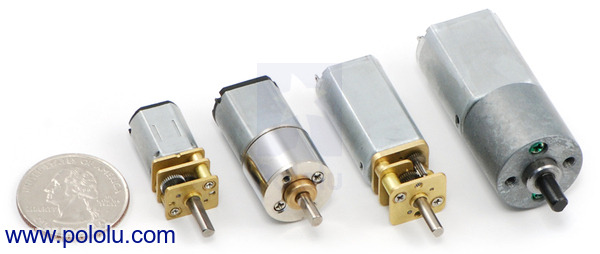 |
| Some of the Pololu metal gearmotors. |
|---|
| Size: | 37D x 54L mm |
|---|---|
| Weight: | 195 g |
| Shaft diameter: | 6 mm |
| Gear ratio: | 70:1 |
|---|---|
| Free-run speed @ 6V: | 75 rpm1 |
| Free-run current @ 6V: | 250 mA1 |
| Stall current @ 6V: | 2500 mA1 |
| Stall torque @ 6V: | 100 oz·in1 |
| Free-run speed @ 12V: | 150 rpm |
| Free-run current @ 12V: | 300 mA |
| Stall current @ 12V: | 5000 mA |
| Stall torque @ 12V: | 200 oz·in |
No; the information we have available for this motor can be found on its product page. However, you can approximate various additional motor parameters from the information found in the “Specs” tab.
The electrical resistance of the motor can be approximated by dividing the rated voltage by the stall current (at the rated voltage). The electromotive force constant (Ke) can be approximated by dividing the rated voltage by the free-run speed (at the rated voltage). To approximate the motor torque constant (Kt), you can divide the stall torque by the stall current.
For pretty much any DC motor, the current, speed, power, and efficiency curves as a function of torque will look like those in the graph below (assuming motor voltage and temperature are constant):
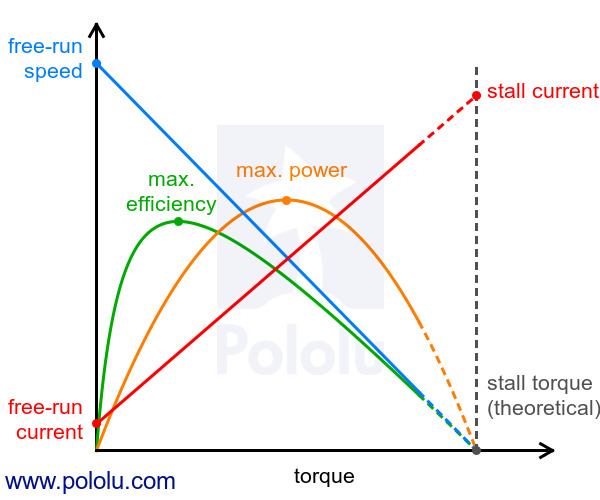 |
The current and speed curves are approximately linear, and the product pages for our motors provide the approximate end points for these lines: (0 torque, no-load current) and (stall torque, stall current) for the red line, and (0 torque, no-load speed) and (stall torque, 0 speed) for the blue line.
The orange output power curve is the product of the speed and the torque, which results in an inverted parabola with its peak at 50% of the stall torque.
The green efficiency curve is the output power divided by the input power, where the input power is current times voltage. The voltage is constant, so you can divide the output power curve by the current line to get the general shape of the efficiency curve, which in turn lets you identify the torque, speed, and current that correspond to max efficiency.
There are many programs out there that you can use to generate these curves. For example, if you have access to MATLAB, you can use this customer-created MATLAB script to generate these motor plots for you from the specifications we provide for each gearmotor.
Note: A good general rule of thumb is to keep the continuous load on a DC motor from exceeding approximately 20% to 30% of the stall torque. Stalling gearmotors can greatly decrease their lifetimes, occasionally resulting in immediate damage to the gearbox or thermal damage to the motor windings or brushes. Do not expect to be able to safely operate a brushed DC gearmotor all the way to stall. The safe operating range will depend on the specifics of the gearmotor itself.



![Dimensions of the 37D mm metal gearmotor (without encoder). Units are mm over [inches]](/Cache/Files/ProductImageOriginals/13254_Dimensions_of_the_37D_mm_metal_gearmotor_without_encoder_Units_are_mm_over_inches_.jpg?v636600100920371319)