The GWS S03N XF Standard Servo is the faster option between the S03N models we carry, providing 34 oz-in at a speed of 0.12 seconds per 60 degrees of motion at 6 V.

Pololu - Servos!

Pololu - Torxis servo with quarter for size reference
We carry a wide variety of servos, from ultra-high-torque monster servos with up to 1600 oz-in of torque, to sub-micro servos weighing less than 3 g (0.11 oz), to continuous rotation servos that are great actuators for beginner robotics projects, and all of our servos are compatible with our servo controllers.
Whatever your application, we probably have a servo for it! Our parametric search of our assortment of servos can help you find the servo you’re looking for.
Note: Servos must be connected to a servo controller, RC receiver, or microcontroller to be used. Except where specifically noted otherwise, our servos have female JR connectors, which are compatible with male JR connectors and male Futaba connectors as well as 1×3 0.1" male header pins.
| Size: | 39.5 x 20.0 x 39.6 mm |
|---|---|
| Weight: | 41 g |
| Digital?: | N |
|---|---|
| Speed @ 6V: | 0.12 sec/60° |
| Stall torque @ 6V: | 2.5 kg·cm |
| Speed @ 4.8V: | 0.15 sec/60° |
| Stall torque @ 4.8V: | 2.2 kg·cm |
| Lead length: | 270 mm |
| Hardware included?: | Y |
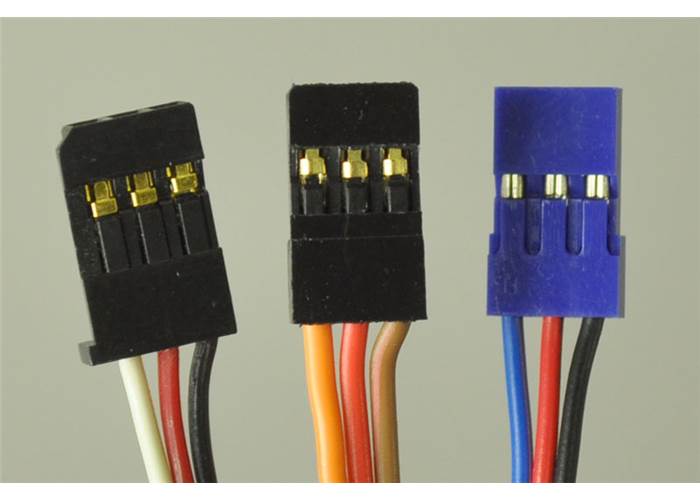
Pololu - Common RC servo connectors. From left to right: Futaba, JR, Airtronics Z
Most standard radio control servos (and all RC servos we sell) have three wires, each a different colour. Usually, they are either black, red, and white, or they are brown, red, and orange/yellow:
Please check the specs for your servo to determine the proper power supply voltage, and please take care to plug the servo into your device in the proper orientation (plugging it in backwards could break the servo or your device).
We do not specify the range of rotation of our servos because this information is not generally available from servo manufacturers. RC servos are usually intended for controlling things like the steering mechanism in an RC car or the flaps on an RC plane. Manufacturers make sure that the range is enough for these typical applications, but they do not guarantee performance over a wider range.
This means most RC servos will rotate about 90° using the standard 1–2 ms pulse range used by most RC receivers. However, if you are using a controller capable of sending a wider range of pulses, many servos can rotate through almost 180°.
You can find a servo’s limits if you use a servo controller that can send pulses outside of the standard range (such as our Maestro servo controllers). To find the limits, use the lowest possible supply voltage at which the servo moves, and gradually increase or decrease the pulse width until the servo does not move any further or you hear the servo straining. Once the limit is reached, immediately move away from it to avoid damaging the servo, and configure your controller to never go past the limit.
You might be wondering why we do not just follow the above steps for all the servos we carry and list a specification for degrees of rotation. Unfortunately, since servo manufacturers do not specify the range of rotation, it might change from one manufacturing run to the next. They will not inform us about changes that are not specified, and we have no way of knowing if or when they might change their manufacturing process.
For more information about servos and how to control them, we recommend the series of blog posts on servos starting with: Introduction to servos.
