This kit gives you the structural pieces you need to build your own Balboa chassis with stability conversion. The chassis includes an integrated battery holder that can be configured for 4 or 6 AA cells.
Special Order
Shipping from $9.90
+94 more from our supplier in 7-10 days
Our Code: SKU-004692
Supplier Link: [Pololu MPN:3573]
This kit gives you the structural pieces you need to build your own Balboa chassis with stability conversion. The chassis includes an integrated battery holder that can be configured for 4 or 6 AA cells. Two configurable gearboxes further increase the gear ratio from the required micro metal gearmotors while supporting the weight of the robot with ball bearings rather than the gearmotor shafts themselves. The chassis works with a variety of wheel sizes and micro metal gearmotors, so wheels and motors are not included; choose your own wheels and motors to personalize your robot.
Unlike the Balboa 32U4 Balancing Robot Kit, no electronics are included: this chassis is for those who want to supply their own custom electronics.
This chassis kit consists of the structural pieces from the Balboa 32U4 Robot Kit plus the Stability Conversion add-on, giving you almost everything you need to build a differential-drive Balboa robot based on your own electronics. Motors and wheels are deliberately not included with the kit so that you can pick your own to customise the look and performance of your robot (see the Selecting motors and wheels section below for more information). The kit includes the following parts:

Balboa Chassis with Stability Conversion Kit (No Motors, Wheels, or Electronics).
The majority of the chassis is made from black ABS plastic, and these pieces securely snap together for quick assembly. The main chassis piece contains an integrated battery holder that can be configured for four or six AA batteries (batteries are not included), and it also has slots for two micro metal gearmotors, which are held in place by two configurable plastic gearboxes. These gearboxes further increase the gear ratio of the required gearmotors while the weight of the chassis with ball bearings rather than the gearmotor shafts themselves. The gearboxes also position the wheel shafts along the central plane of the battery holder, which is helpful for balancing applications.
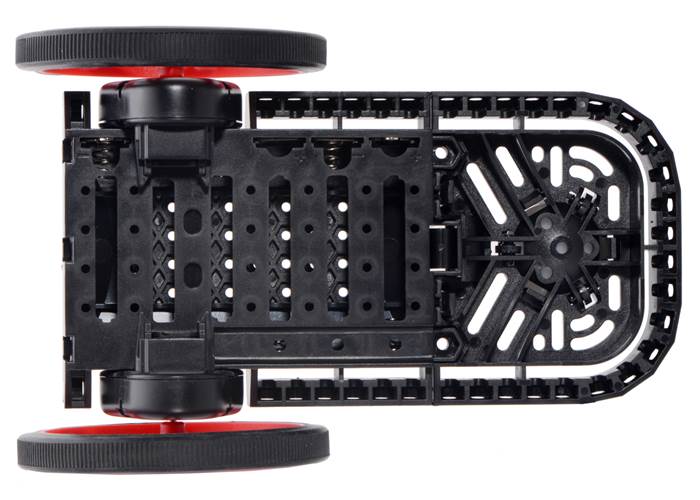
Top view of the Balboa Chassis with Stability Conversion Kit and 80×10mm Pololu Wheels. |
Balboa Chassis with Stability Conversion Kit and 80×10mm Pololu Wheels. |
Bottom view of the Balboa Chassis with Stability Conversion Kit and 80×10mm Pololu Wheels. |
The stability conversion piece holds a large ball castor and clips onto the front of the chassis to provide a smooth third point of contact for traditional differential-drive applications. If you are using this chassis to make a balancing robot, you can leave this piece off, or you can add it without the ball castor to make the chassis taller and to provide additional mounting points.
For balancing applications, please consider also getting the bumper cage kit for Balboa to make it easier for your robot to pop itself up from horizontal and to help protect your electronics from falls.
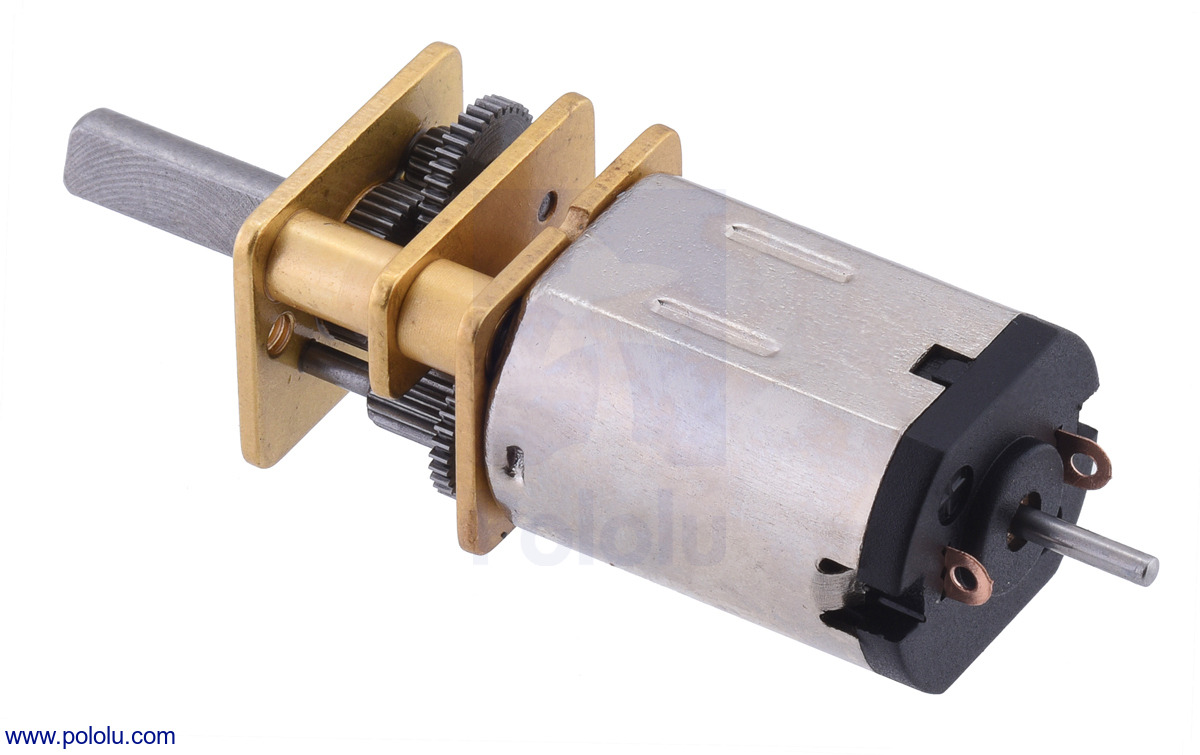
The Balboa chassis will work with any of our micro metal gearmotors. These gearmotors are available in a variety of different gear ratios and power levels, and we do not include any with the kit so you can choose the ones that will work best for your particular application. For a general purpose robot, we recommend the 30:1 HPCB, 50:1 HPCB, or 75:1 HPCB micro metal gearmotors with extended back shafts that can be used with encoders. Even if you do not plan on using encoders on your first robot, it is nice to have the option later. Please note that the gearmotors you pick will be further reduced by the gearboxes on the chassis, which offer five reduction options during assembly ranging from 1.64:1 to 2.88:1 (see this gear ratio chart (447k pdf) for more information).
|
Balboa Chassis with Stability Conversion Kit and 60×8mm Pololu Wheels. |
|
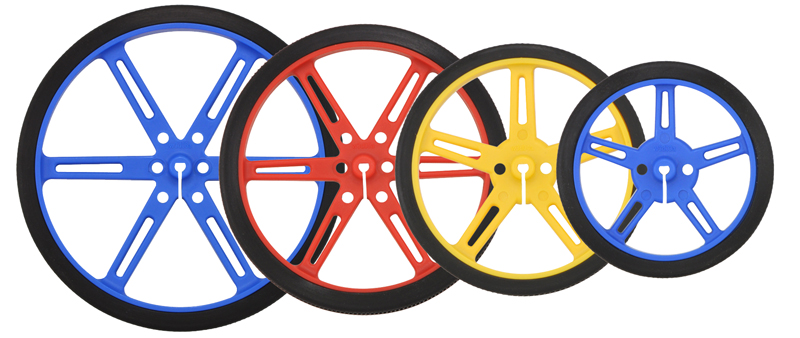
We also do not include wheels with the kit since there are many colors and sizes to choose from. If you are using it as a traditional chassis oriented on its side and supported by two wheels and the included ball castor, any wheel size from 60×8mm up through 90×10mm can work. Note that the chassis will be approximately level with the 60×8mm wheels, and with larger wheels, the front will slope down. For balancing applications, we recommend 80×10mm Pololu wheels. See our full selection of Pololu wheels for more options. This diagram shows the possible chassis angles with four different wheel sizes ranging from 60 mm through 90 mm:
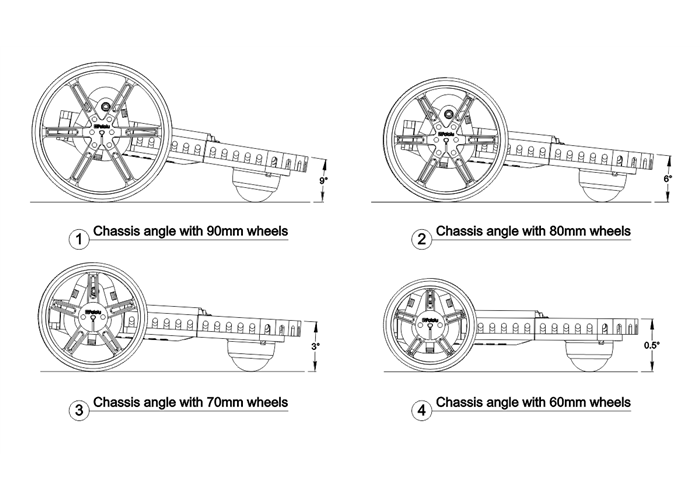
Variety of chassis angles available when using different wheels on the Balboa Chassis with Stability Conversion.
Balboa Chassis with Stability Conversion Kit and 80×10mm Pololu Wheels. (1) |
Balboa Chassis with Stability Conversion Kit and 60×8mm Pololu Wheels. (1) |
The assembly instructions of the Balboa 32U4 Robot user’s guide also apply to the Balboa Chassis Kit. Just skip the steps pertaining to the Balboa 32U4 control board and instead install your own electronics! And if you later decide you want to turn your chassis into a Balboa 32U4 robot, the Balboa 32U4 control board is available separately.

User’s manual for the Pololu Balboa 32U4 balancing robot.
This printable 1:1 scale chart helps you identify the gears included in the Balboa 32U4 Robot Kit and Balboa Chassis Kit and details the available gear ratios.
Note: this model includes micro metal gearmotors and 80mm wheels that are sold separately from the Balboa 32U4 Balancing Robot Kit. This model uses a simplified model of the Balboa 32U4 Control Board to reduce the file size.