This partial kit gives you the flexibility make a customised Orangutan SVP-1284 with the headers and other through-hole components that best suit your project.
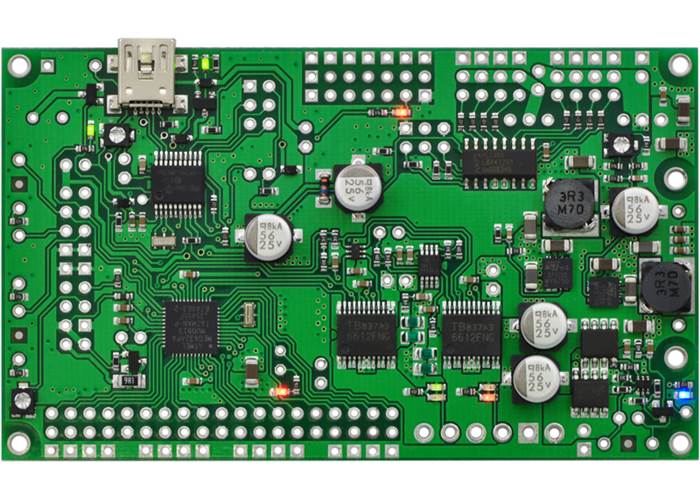
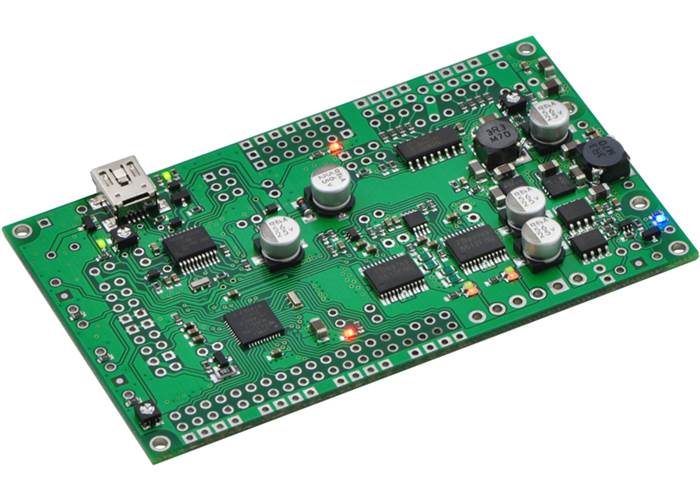
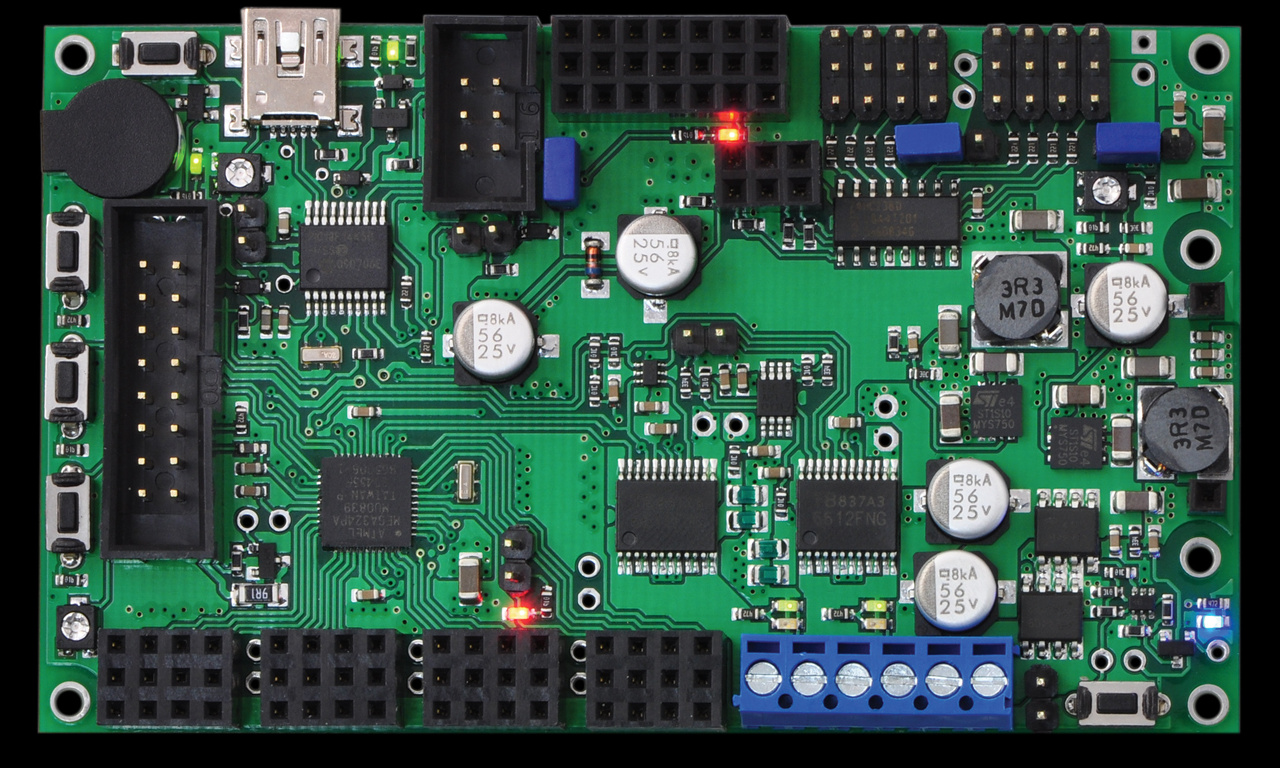
Orangutan SVP kit top view
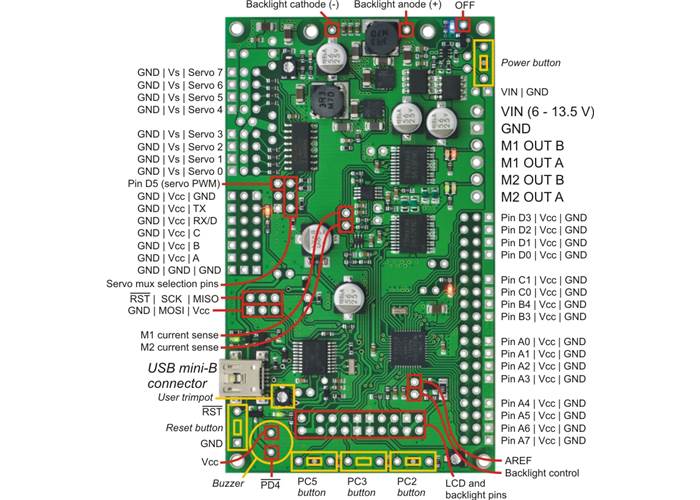
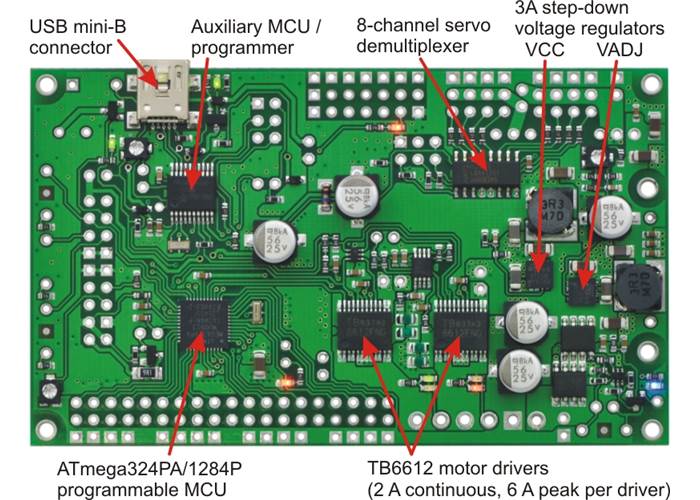
The Orangutan SVP robot controller is a complete control solution for small and medium-sized robots running at 6 – 13.5 V. The module is designed around the powerful Atmel ATmega324PA AVR microcontroller (32 KB flash, 2 KB RAM, and 1 KB EEPROM) or ATmega1284P (128 KB flash, 16 KB RAM, and 4 KB EEPROM) running at 20 MHz and features a full complement of peripheral hardware to support robotics applications. For a detailed description of the Orangutan SVP’s capabilities, please see the product page for the fully assembled SVP-324 or fully assembled SVP-1284.
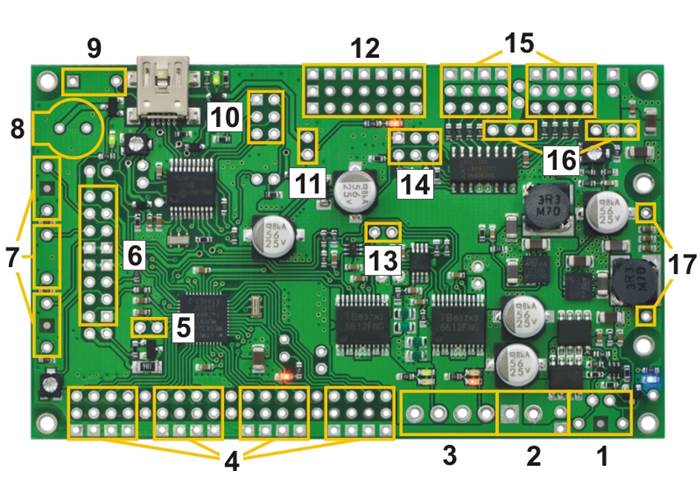
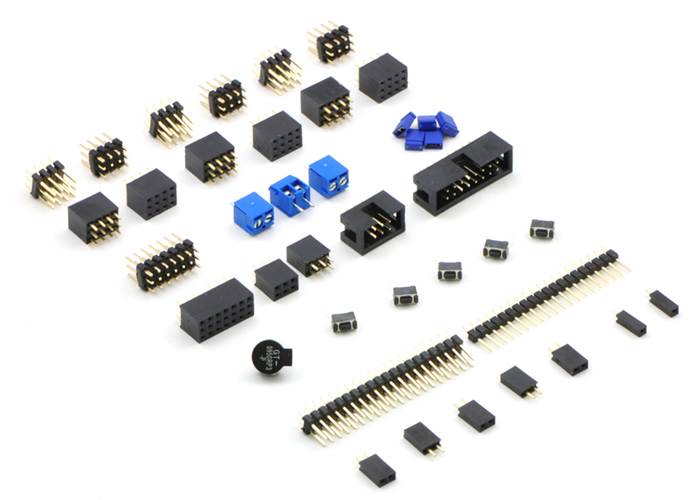
The Orangutan SVP partial kit PCB has all of the surface-mount components pre-soldered, as shown to the right, and the kit includes the following through-hole components so that you can customise the robot controller to your particular application:
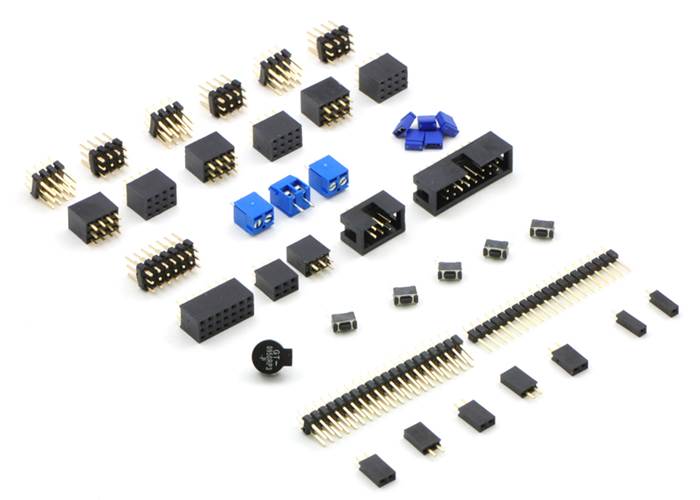
Hardware included with the Orangutan SVP partial kit
Like the fully assembled version, the kit includes a USB A to mini-B cable.
The Orangutan SVP partial kit does not include an LCD. Our 16×2 LCDs (both with backlight and without) can be plugged directly into the PCB if you solder a 2×7 female header to the left side of the LCD and two single male pins to the right side of the LCD. These two male pins provide structural support for the LCD and power the backlight on the version with a backlight. You can connect your own parallel-interface (HD44780) LCD, such as our 20×4 LCD to the LCD port via a 16-conductor ribbon cable.
Since the Orangutan SVP partial kit includes headers of both genders, you have the ability to solder in the gender that best suits the peripherals you plan to connect to the board, or you could go for an even more compact installation and solder your peripherals directly to the I/O pads. Since the buzzer and pushbuttons are not pre-soldered, you can replace these with components of your choosing, such louder speakers (the Orangutan SVP powers the buzzer through a transistor rather than a microcontroller I/O pin, so it can support much higher-power speakers than previous Orangutans) and bigger buttons located off of the board.
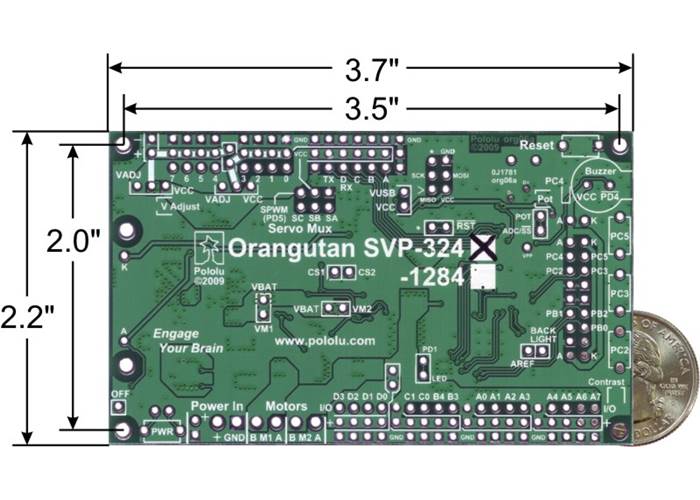
| Size: | 3.70" x 2.20" |
|---|---|
| Weight: | 0.9 oz |
| Processor: | ATmega1284P @ 20 MHz with auxiliary PIC |
|---|---|
| RAM size: | 16384 bytes |
| Program memory size: | 128 Kbytes |
| Motor driver: | Dual TB6612FNGs |
| Motor channels: | 2 |
| User I/O lines: | 211 |
| Max current on a single I/O: | 40 mA |
| Minimum operating voltage: | 6 V |
| Maximum operating voltage: | 13.5 V |
| Continuous output current per channel: | 2 A |
| Peak output current per channel: | 6 A |
| Current sense: | 0.85 V/A |
| Maximum PWM frequency: | 80 kHz |
| Reverse voltage protection?: | Y |
| External programmer required?: | N |
| LCD included?: | N |
 Pololu Orangutan SVP User’s Guide (Printable PDF)
Pololu Orangutan SVP User’s Guide (Printable PDF)
User’s guide for the Pololu Orangutan SVP-324 and SVP-1284 robot controllers (both assembled and partial-kit versions).
 Pololu AVR Programming Quick Start Guide (Printable PDF)
Pololu AVR Programming Quick Start Guide (Printable PDF)
This guide explains how to get started programming your Orangutan or 3pi Robot in Windows, Linux or Mac OS X. It covers setting up an AVR development environment (Atmel Studio for Windows users), installing the Pololu AVR C/C++ Library, and setting up the Pololu USB AVR Programmer.
 Pololu AVR C/C++ Library User’s Guide (Printable PDF)
Pololu AVR C/C++ Library User’s Guide (Printable PDF)
Information about installing and using the C/C++ libraries provided for use with Pololu products.
 Pololu AVR Library Command Reference (Printable PDF)
Pololu AVR Library Command Reference (Printable PDF)
A reference to commands provided in the Pololu C/C++ and Arduino libraries for the AVR.
Guide for programming Orangutans and the 3pi robot from the Atmel’s older AVR Studio 4 IDE. It covers installing the Pololu AVR C/C++ Library, and setting up the Pololu USB AVR Programmer.
RoboRealm provides an AVR program that can be installed on the Orangutan SVP, which makes many features of the Orangutan SVP available through RoboRealm’s graphical user interface.
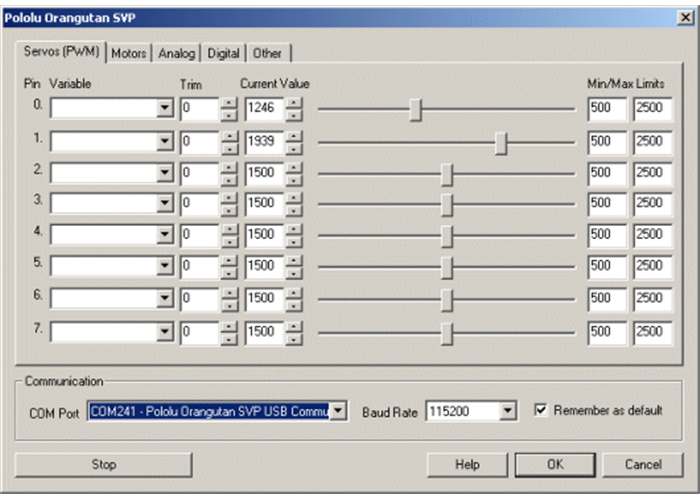
Pololu - A screenshot of RoboRealm’s PC software for controlling the Orangutan SVP
{kind=link}
{kind=link}