This 228:1 gearbox with brushed DC motor has a low-current motor and provides power and speed that is comparable to an RC servo at a fraction of the cost. At 6 V, it has a free-run speed of 45 RPM and a stall torque of approximately 100 oz-in.

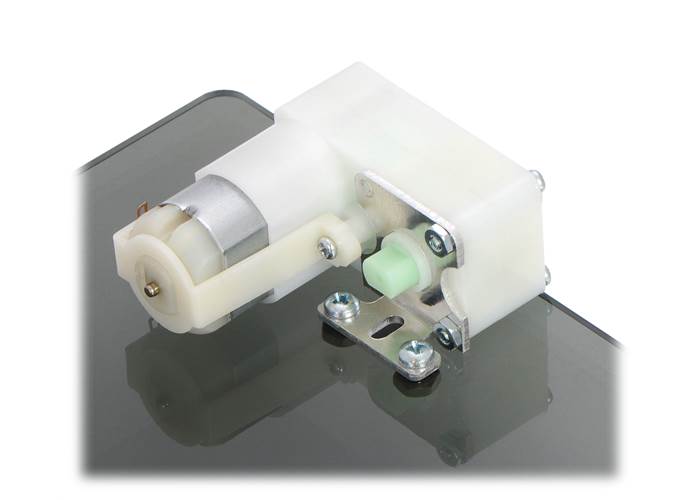
Pololu plastic gearmotor offset output with opened gearbox
This 228:1 plastic gearmotor (gearbox with brushed DC motor) is a great low-cost alternative to modified hobby servos or Tamiya gearboxes. The low-current motor is a perfect match for our qik 2s9v1 dual serial motor controller, Baby Orangutan robot controller, or DRV8833 dual motor driver carrier, and the compact size makes this unit an attractive choice for small robot designs. The recommended operating voltage range for this motor is 3 – 12 V.
This is a higher-torque, lower-speed version of the 120:1 plastic gearmotor offset output. At 6 V, the gearbox and motor provide approximately 100 oz-in of torque and 45 RPM. The free-running current is 70 mA, and the stall current is 800 mA. The gearbox is protected by a built-in safety clutch that will typically slip before gear teeth can shear.
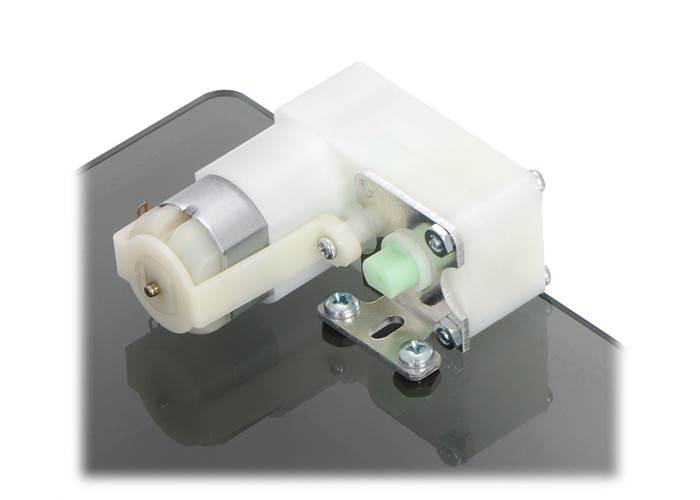
This gearmotor comes pre-assembled, with the gears fully enclosed, and the output shaft is 6 mm long and 7 mm in diameter with two sides flattened. The output shaft is along the same axis as the motor shaft, but offset; we also sell a similar gearmotor with a 90° output shaft.
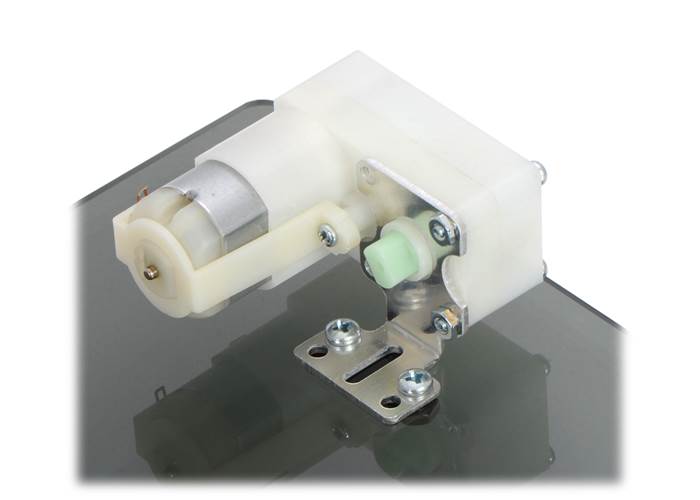
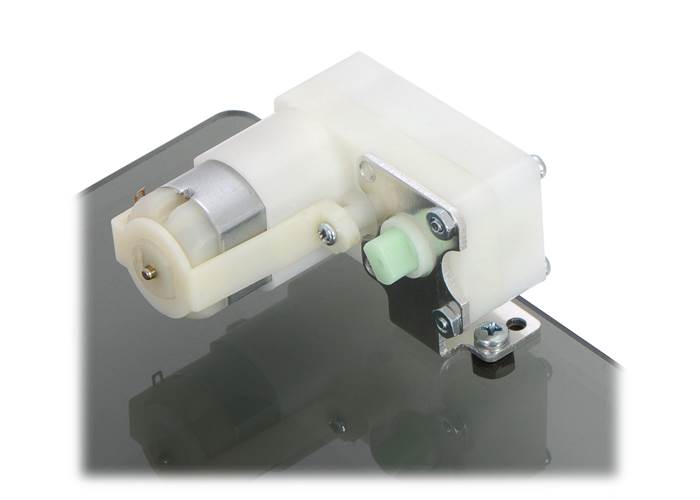
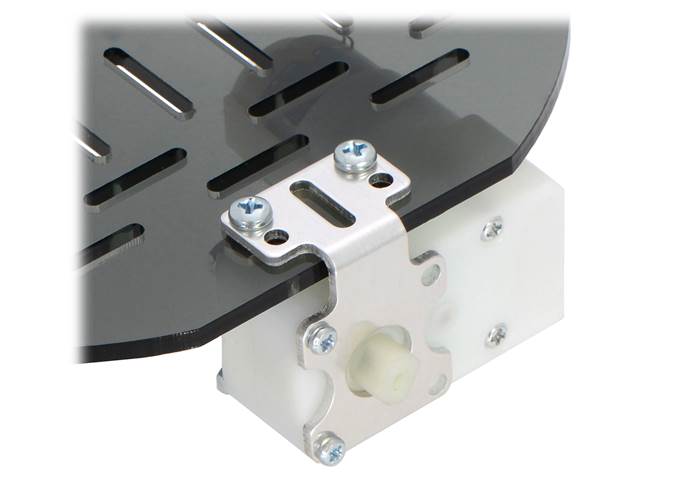
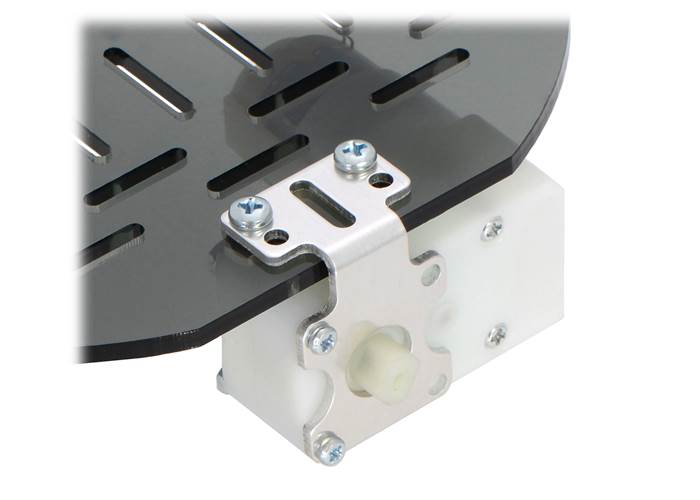
There are two built-in mounting holes that work with our stamped aluminium L-bracket and extended stamped aluminium L-bracket, as shown in the pictures below:
Plastic gearmotor with offset output (item #1118 or #1119) mounted with Pololu stamped aluminum L-bracket |
Plastic gearmotor with offset output (item #1118 or #1119) mounted with Pololu extended stamped aluminum L-bracket (2) (2) |
This gearmotor is compatible with the Solarbotics GMPW plastic wheel, which is available in a variety of colors.
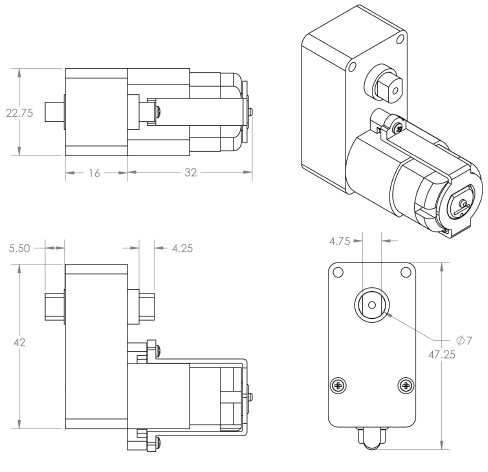 |
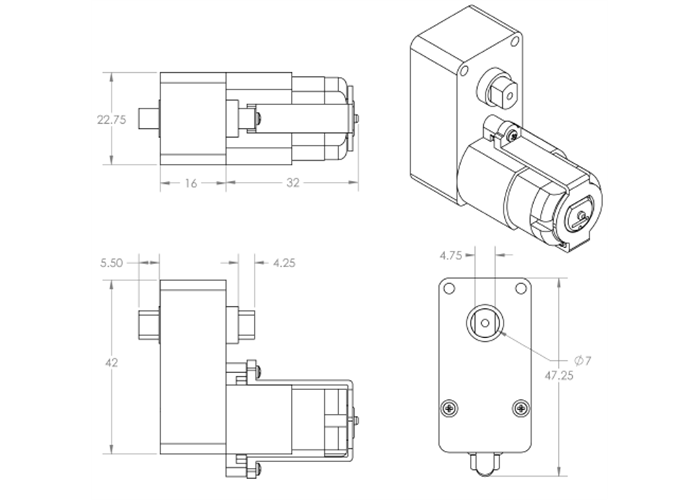
| Dimensions (in mm) of the 120:1 and 228:1 plastic gearmotors with offset outputs. |
|---|
You can download a pdf version of this drawing here (104k PDF).
| Size: | 42 x 22.7 x 47.8 mm1 |
|---|---|
| Weight: | 33 g |
| Shaft diameter: | 7 mm |
| Typical operating voltage: | 6 V |
|---|---|
| Gear ratio: | 228:1 |
| Free-run speed @ 6V: | 45 rpm |
| Free-run current @ 6V: | 70 mA |
| Stall current @ 6V: | 800 mA |
| Stall torque @ 6V: | 100 oz·in |
No; the information we have available for this motor can be found on its product page. However, you can approximate various additional motor parameters from the information found in the “Specs” tab.
The electrical resistance of the motor can be approximated by dividing the rated voltage by the stall current (at the rated voltage). The electromotive force constant (Ke) can be approximated by dividing the rated voltage by the free-run speed (at the rated voltage). To approximate the motor torque constant (Kt), you can divide the stall torque by the stall current.
For pretty much any DC motor, the current, speed, power, and efficiency curves as a function of torque will look like those in the graph below (assuming motor voltage and temperature are constant):
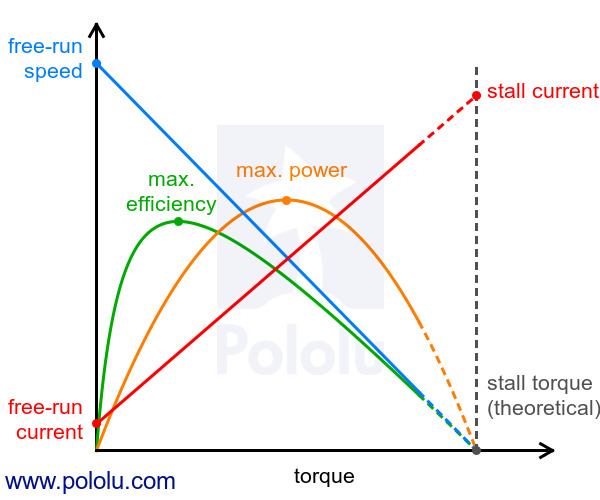 |
The current and speed curves are approximately linear, and the product pages for our motors provide the approximate end points for these lines: (0 torque, no-load current) and (stall torque, stall current) for the red line, and (0 torque, no-load speed) and (stall torque, 0 speed) for the blue line.
The orange output power curve is the product of the speed and the torque, which results in an inverted parabola with its peak at 50% of the stall torque.
The green efficiency curve is the output power divided by the input power, where the input power is current times voltage. The voltage is constant, so you can divide the output power curve by the current line to get the general shape of the efficiency curve, which in turn lets you identify the torque, speed, and current that correspond to max efficiency.
There are many programs out there that you can use to generate these curves. For example, if you have access to MATLAB, you can use this customer-created MATLAB script to generate these motor plots for you from the specifications we provide for each gearmotor.
Note: A good general rule of thumb is to keep the continuous load on a DC motor from exceeding approximately 20% to 30% of the stall torque. Stalling gearmotors can greatly decrease their lifetimes, occasionally resulting in immediate damage to the gearbox or thermal damage to the motor windings or brushes. Do not expect to be able to safely operate a brushed DC gearmotor all the way to stall. The safe operating range will depend on the specifics of the gearmotor itself.