CMUcam V4 is a camera module designed specifically for robotics. It features an on board processor that supports blob and colour tracking, image statistics, clipping and more. The camera is colour VGA 640x480 and with low power consumption, small form factor and a TTL serial interface this camera is ideal for small robotics installations.
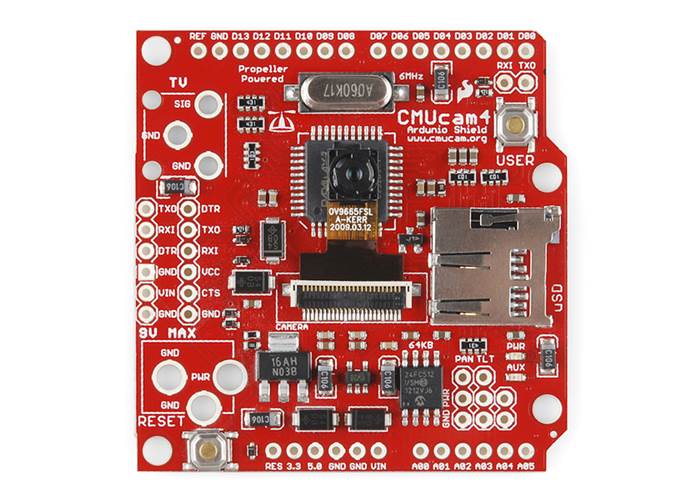
Computer vision is seriously cool technology but it takes a lot of processing power, it'd be nice to give your next microprocessor project the power to identify motion and color, but something like an Arduino would struggle to keep up. What you can do is have a dedicated processor do the heavy-lifting and then pipe that data to the Arduino, and that's exactly what the CMUcam4 does. The CMUcam4 is a fully programmable embedded computer vision sensor. The main processor is the Parallax P8X32A (Propeller Chip) connected to an OmniVision 9665 CMOS camera sensor module.
The CMUcam4 can be used to track colors or collect basic image statistics. The best performance can be achieved when there are highly contrasting and intense colors. For instance, it can easily track a red ball on a white background, but it would be hard to differentiate between different shades of brown in changing light. Tracking colorful objects can be used to localize landmarks, follow lines, or chase moving beacons. Using color statistics, it is possible for the CMUcam4 to monitor a scene, detect a specific color, or do primitive motion detection. If the CMUcam4 detects a drastic color change, then chances are something in the scene changed. Using “line mode”, the CMUcam4 can generate low resolution binary images of colorful objects. This can be used to do more sophisticated image processing that includes line following with branch detection, or even simple shape recognition. These more advanced operations require custom algorithms to post process the binary images sent from the CMUcam4. As is the case with a normal digital camera, this type of processing might require a computer or at least a fast microcontroller.
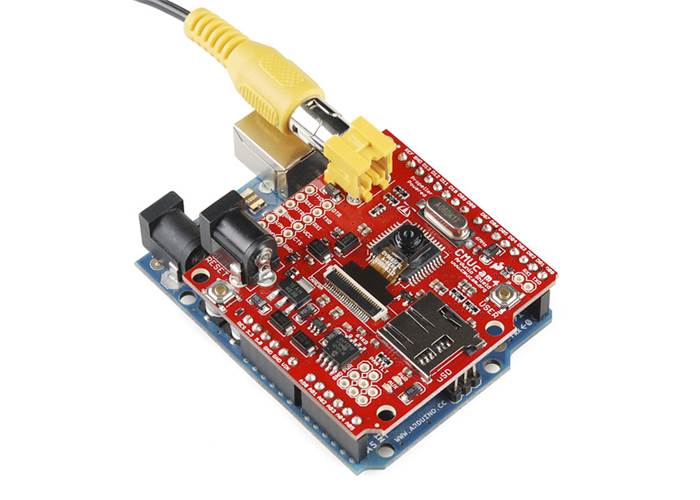
The most common configuration for the CMUcam4 is to have it communicate to a master processor via a standard TTL serial port. This “master processor” could be a computer (through USB or RS232), Arduino, Basic Stamp, PIC, or similar microcontroller. The CMUcam4 is small enough to add simple vision to embedded systems that can not afford the size or power of a standard computer based vision system. Its communication protocol and baud rate is designed to accommodate even the slowest of processors. For even slower processors, the CMUcam4 can operate in “poll mode”. In this mode, the host processor can ask the CMUcam4 for just a single packet of data. This gives slower processors the ability to more easily stay synchronized with the data. It is also possible to add a delay between individual serial data characters using the “delay mode” command. Due to communication delays, both poll mode and delay mode will lower the total number of frames that can be processed in one second.
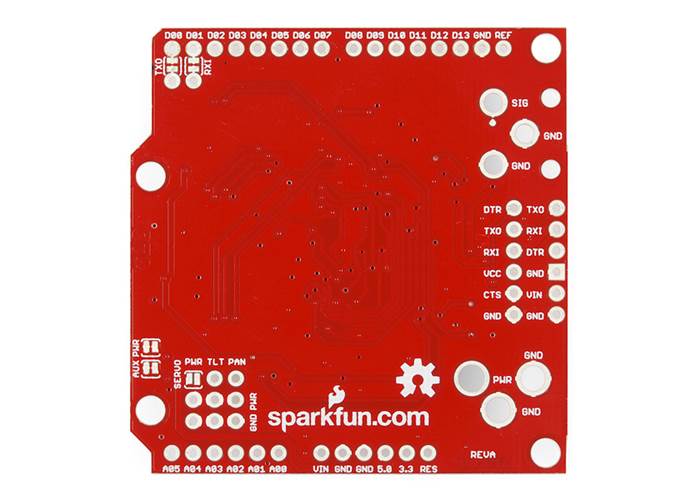
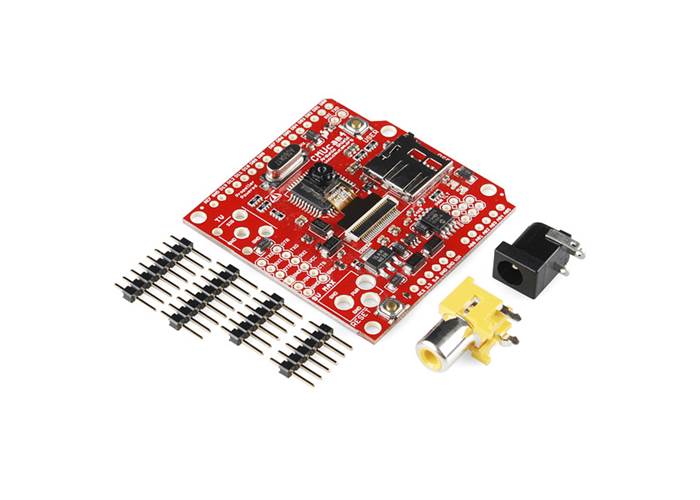
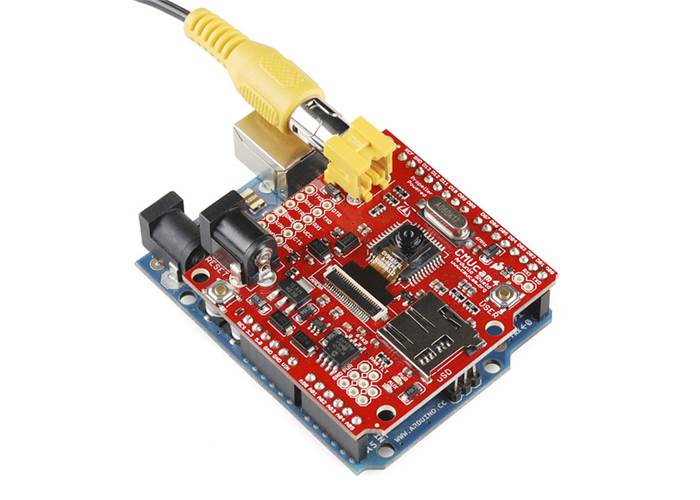
The RCA and barrel jack aren't populated because the connectors can affect the field of view when mounting the unit in an enclosure. Also, the servo power bus is disconnected in its default state, you will need to close the 'Servo EN' jumper on the back side of the board to enable power to the Pan/Tilt servos.
To program the Arduino with the CMUcam shield connected, you need to either use the 'HALT' feature, or disconnect the serial jumpers (SJ4 and SJ5), connect the two pin header (J1) to any digital Arduino pins, and then use the SoftwareSerial library included in the Arduino installation.
Note: A portion of this sale is given back to Carnegie Mellon University to help fund continued development of the CMUcam project.
Features:
Includes:
Documents: