This robot controller is by far the most powerful Orangutan, and it is intended for small and medium-sized robots. Featuring a dual-AVR architecture that leaves an ATmega1284P AVR microcontroller almost completely available to the user while taking care of low-level motor control tasks on a pre-programmed mega328, which also doubles as a programmer for the master processor.
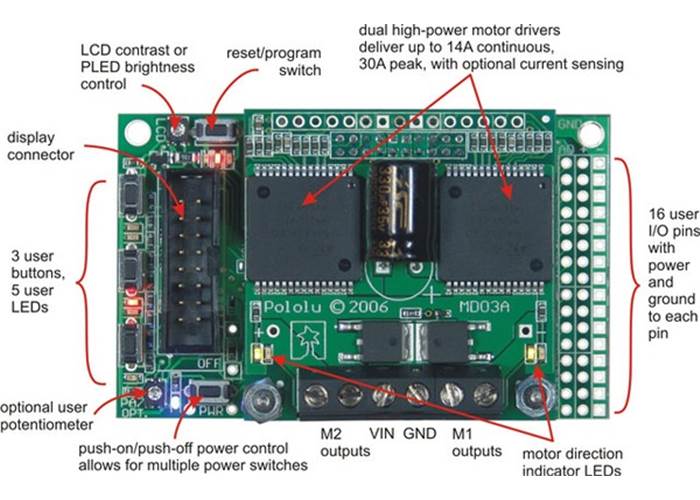
The Orangutan X2, the most powerful member of Pololu’s line of Orangutan robot controllers, is designed to be a compact, high-performance control center for robotics and automation projects. The Orangutan X2’s two-board design allows the unit to maintain the compactness characteristic of the Orangutan line while offering substantially more electrical and computational power: the X2 can deliver up to a horsepower across two motor channels, and the twin-microcontroller architecture allows maximum access to the primary microcontroller, an Atmel ATmega1284P AVR running at 20 MHz with 128 KB of program memory and 16 KB of SRAM. It has an outline smaller than a credit card, which makes it small enough to fit in a mini-sumo or small maze solver, yet it is powerful enough to run a 1/10th-scale monster truck. The board features an integrated dual motor driver capable of delivering 14 A continuous (30 A peak) per channel, a buzzer for simple sounds and music, an LCD port with optional 20×4 character LCD, three user pushbuttons, five user LEDs, a built-in programmer and USB connectivity, and more; a battery, motors, and sensors can be connected directly to the module for quick creation of advanced, powerful robots.
Pololu Orangutan X2 Robot Controller - top labelled
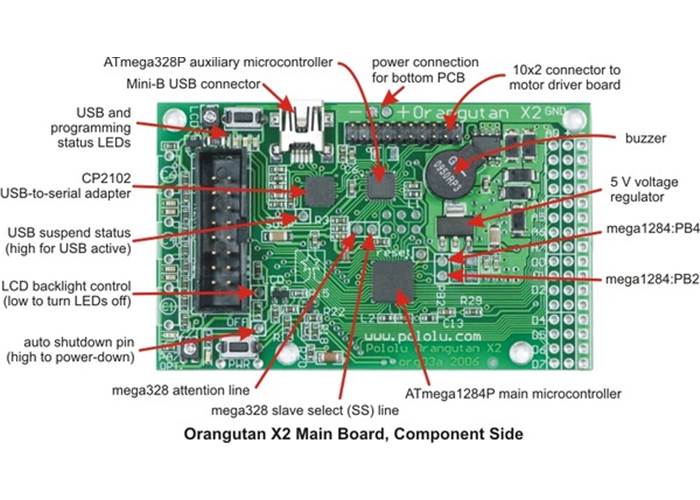
The Orangutan X2 has two microcontrollers: a user-programmable Atmel ATmega1284P AVR for the main application, and an auxiliary ATmega328P that is pre-programmed to interface with most of the dedicated hardware on the X2 and serve as an AVR ISP programmer for the main processor, which means that no external programmer is required. The two-microcontroller design simplifies multitasking by relieving the main processor of common tasks such as motor control and melody generation, and the approach also leaves almost all of the mega1284 hardware peripherals, such as timers and interrupts, and most of the mega1284 I/O lines to be used for your higher-level design.
The Orangutan X2 is compatible with freely available development software for Atmel’s AVR microcontrollers, including Atmel’s AVR/Atmel Studio, the WinAVR GCC C/C++ compiler, and AVRDUDE. Pololu provide an extensive set of software libraries that make it easy to interface with all of the integrated hardware, including the auxiliary microcontroller. Using these libraries, it takes just a few simple lines of code to write to the LCD, read button presses, drive motors, and control servos. These libraries come with a number of sample programs that demonstrate how to use the various components on the Orangutan X2.
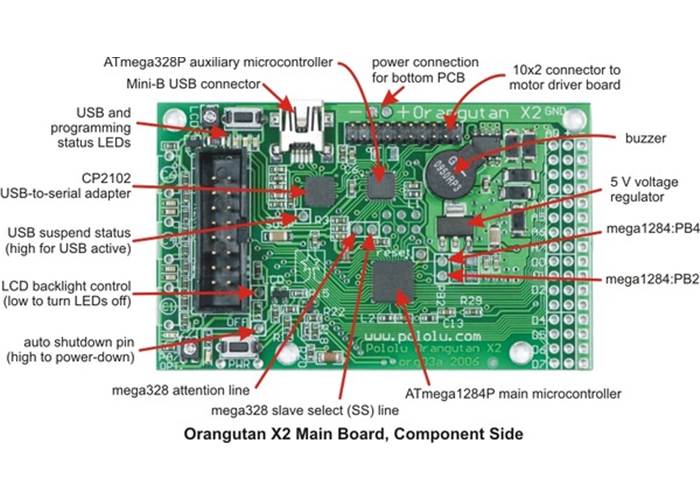
Pololu Orangutan X2 Robot Controller - labelled
| Size: | 3.00" x 1.86" |
|---|
| Processor: | ATmega1284P with slave ATmega328P @ 20 MHz1 |
|---|---|
| RAM size: | 16384 bytes |
| Program memory size: | 128 Kbytes |
| Motor driver: | VNH2SP30 |
| Motor channels: | 2 |
| User I/O lines: | 182 |
| Max current on a single I/O: | 40 mA |
| Minimum operating voltage: | 6 V |
| Maximum operating voltage: | 16 V |
| Continuous output current per channel: | 14 A |
| Peak output current per channel: | 30 A |
| Continuous paralleled output current: | 25 A |
| Current sense: | 0.13 V/A |
| Maximum PWM frequency: | 19.5 kHz |
| Reverse voltage protection?: | Y3 |
| External programmer required?: | N |
| LCD included?: | N |