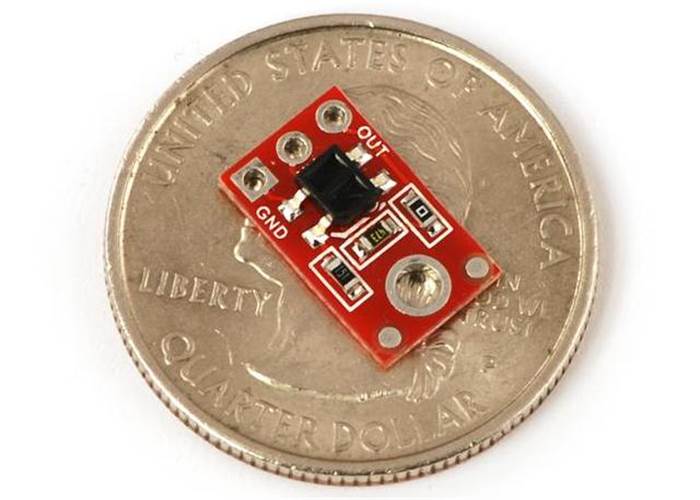
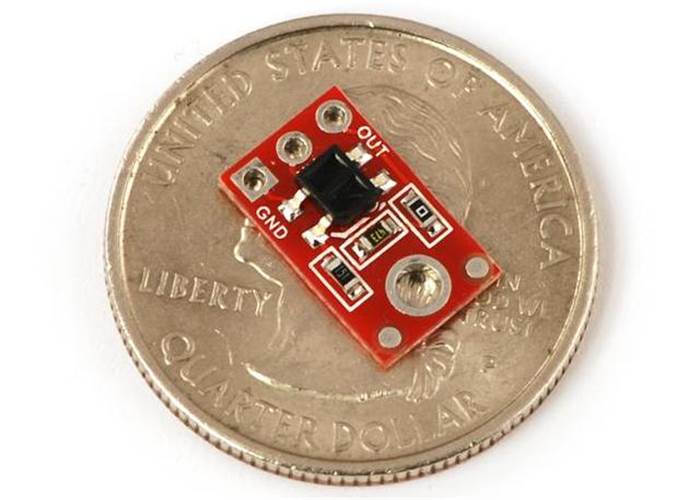
The QTR-1RC reflectance sensor carries a single infrared LED and phototransistor pair in an inexpensive, tiny 0.5" x 0.3" module that can be mounted almost anywhere and is great for edge detection and line following applications. The output is designed to be measured by a digital I/O line.
 This Pololu QTR-1RC sensor is a very affordable way to add responsive edge or line detection capabilities to a robot with very good resonse times from multiple sensors. Sample rates of 1Khz are achievable allowing quick line following or emergency avoidance of cliffs.
This Pololu QTR-1RC sensor is a very affordable way to add responsive edge or line detection capabilities to a robot with very good resonse times from multiple sensors. Sample rates of 1Khz are achievable allowing quick line following or emergency avoidance of cliffs.
The sensor is very small 12.5 x 7.6mm allowing multiple sensors to be added in close proximity and the included hole in the PCB allows easy mounting with a #2 screw (not included). A 3-pin 0.1" header strip is included.
See the resources tab for info on using this sensor with Arduino and other AVR microcontrollers such as the Pololu Orangutan.
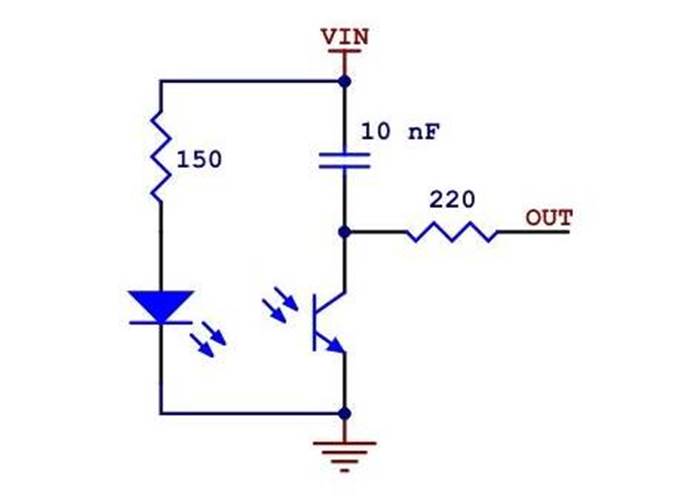
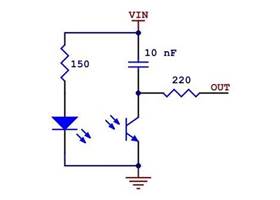 The Pololu QTR-1RC reflectance sensor carries a single infrared LED and phototransistor pair. The phototransistor uses a capacitor discharge circuit that allows a digital I/O line on a microcontroller to take an analog reading of reflected IR by measuring the discharge time of the capacitor. Shorter capacitor discharge time is an indication of greater reflection.
The Pololu QTR-1RC reflectance sensor carries a single infrared LED and phototransistor pair. The phototransistor uses a capacitor discharge circuit that allows a digital I/O line on a microcontroller to take an analog reading of reflected IR by measuring the discharge time of the capacitor. Shorter capacitor discharge time is an indication of greater reflection.
The LED current-limiting resistor is set to deliver approximately 20-25 mA to the LED when VIN is 5 V. The current requirement can be met by some microcontroller I/O lines, allowing the sensor to be powered up and down through an I/O line to conserve power.
Because of its small size, multiple units can easily be arranged to fit various applications such as line sensing and proximity/edge detection.
Like the Parallax QTI, the QTR-1RC module has sensor outputs that require a digital I/O line capable of first charging the output capacitor (by driving the line high) and then measuring the time for the capacitor to discharge through the phototransistor. This measurement approach has several advantages, especially when multiple units are used:
The typical sequence for reading a sensor is:
These steps can typically be executed in parallel on multiple I/O lines.
With a strong reflectance, the discharge time can be as low as several dozen microseconds; with no reflectance, the discharge time can be up to a few milliseconds. The exact time of the discharge depends on your microcontroller’s I/O line characteristics. Meaningful results can be available within 1 ms in typical cases (i.e. when not trying to measure subtle differences in low-reflectance scenarios), allowing up to 1 kHz sampling.
The Pololu AVR library provides functions that make it easy to use these sensors with the Pololu Orangutan robot controllers and other AVR-based controller boards such as Arduinos. Please see section 11 of the Pololu library command reference for more information.
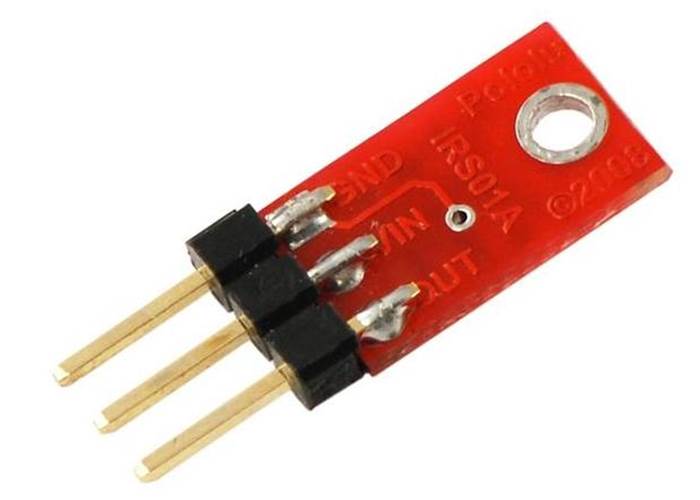
 This module has a single mounting hole intended for a #2 screw (not included); if this mounting hole is not needed, this portion of the PCB can be ground off to make the unit even smaller. The reflectance sensor ships with a 3-pin 0.1" header strip, which can be soldered in the conventional perpendicular orientation or parallel to the PCB, as shown below. You can also solder wires, such as ribbon cable, directly to the pads for the smallest installation.
This module has a single mounting hole intended for a #2 screw (not included); if this mounting hole is not needed, this portion of the PCB can be ground off to make the unit even smaller. The reflectance sensor ships with a 3-pin 0.1" header strip, which can be soldered in the conventional perpendicular orientation or parallel to the PCB, as shown below. You can also solder wires, such as ribbon cable, directly to the pads for the smallest installation.
Pololu AVR C/C++ Library User’s Guide
Information about installing and using the C/C++ libraries provided for use with Pololu products.
A guide to using the Pololu QTRSensors library with Arduinos and Arduino-compatible devices like the Pololu Orangutan robot controllers.
A reference to commands provided in the Pololu C/C++ and Arduino libraries for the AVR.
Building Line Following and Line Maze Courses
Step-by-step instructions for building your own line-following courses.