The UM6-LT ultra-miniature orientation sensor from CH Robotics is uses rate gyros, accelerometers, magnetic sensors, and an on-board 32-bit ARM Cortex processor to compute sensor orientation 1000 times per second. Sensor orientation is reported using either quaternions or Euler angles over a TTL serial interface at user-customizable rates.
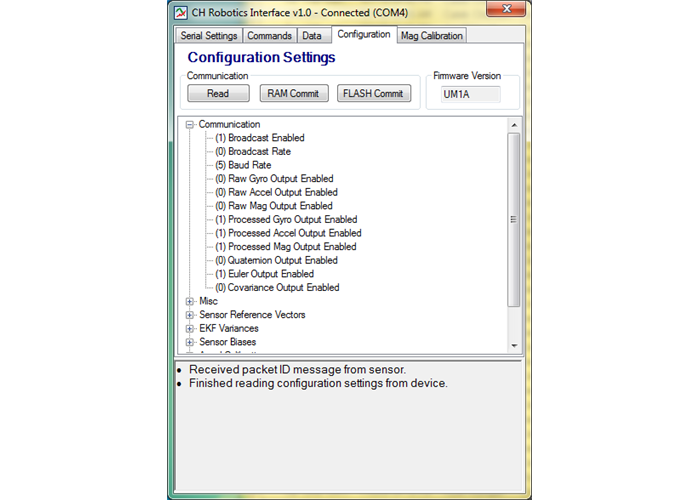
The UM6-LT ultra-miniature orientation sensor—also known as an Attitude and Heading Reference System, or AHRS—from CH Robotics is an OEM version of their UM6 orientation sensor. Like the UM6, it uses rate gyros, accelerometers, magnetic sensors, and an on-board 32-bit ARM Cortex processor to estimate the absolute sensor orientation 1000 times per second. Sensor orientation is reported using either quaternions or Euler angles over a TTL serial interface at user-customizable rates. A USB-to-serial adapter can be used to connect the IMU to a computer running the free CH Robotics Serial Interface PC application, which allows for easy data visualization, board calibration, and UM6-LT settings configuration.
The UM6-LT is functionally identical to the UM6 (it uses the same firmware and works with the same PC software). The only difference is that the UM6-LT lacks the UM6’s enclosure and 4-pin connector. Please see the UM6/UM6-LT datasheet (475k pdf) for board specifications and usage information.
The UM6-LT is a pin-compatible replacement for the CHR-6dm AHRS sensor, which has been discontinued, so it can be physically swapped directly into systems that use the CHR-6dm. However, the UM6-LT uses the UM6 communication protocol, not the CHR-6dm protocol, so such a swap will require software modification.
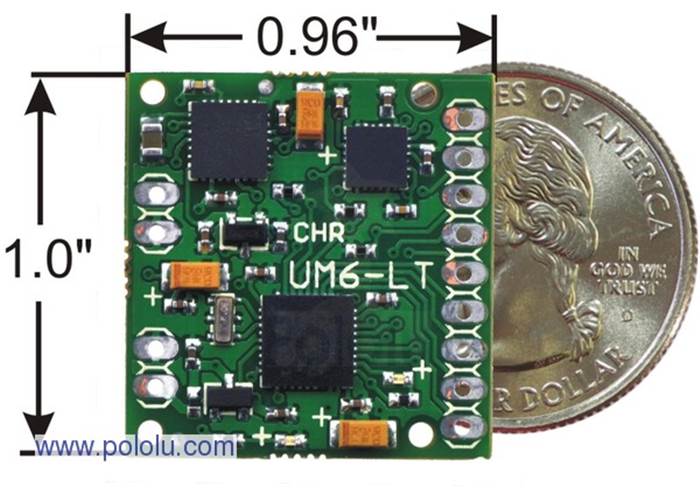
| Size: | 1.0" x 0.96" x 0.1" |
|---|---|
| Weight: | 2.5 g |
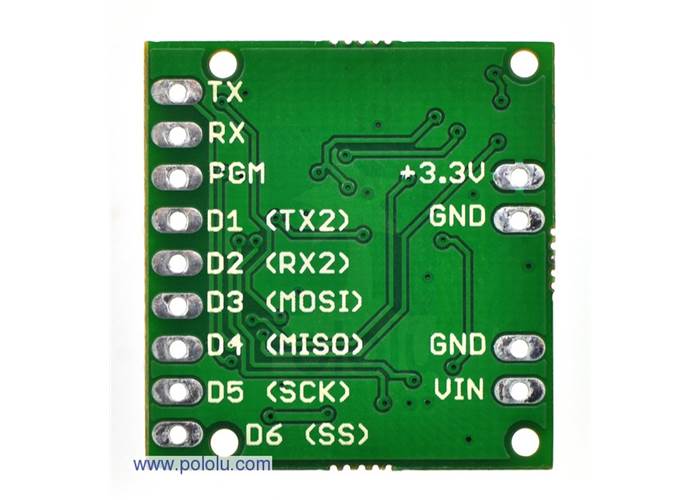
| Interface: | TTL serial |
|---|---|
| Baud: | 115200 bps |
| Minimum operating voltage: | 3.5 V |
| Maximum operating voltage: | 5 V |
| Axes: | pitch (x), roll (y), and yaw (z) |
| Measurement range: | ±2000°/s (gyro) ±2 g (accelerometer) |
| Supply current: | 52 mA |