This rugged, 4-wheel-drive chassis from Dagu Electronics has independent suspension for each of its spiked 120mm-diameter wheels, allowing exceptional traction over uneven terrain, and its body is made from 2mm-thick anodized aluminium with a 10mm-pitch grid of 4mm holes, making it easy to mount...
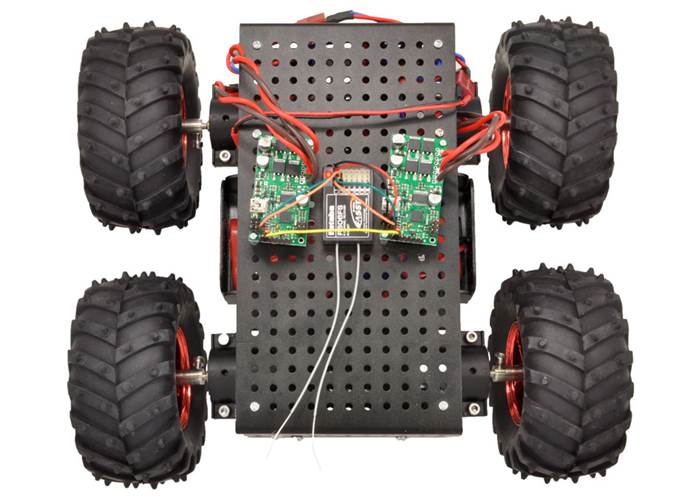
Bottom view of Dagu Wild Thumper 4WD chassis (silver version)
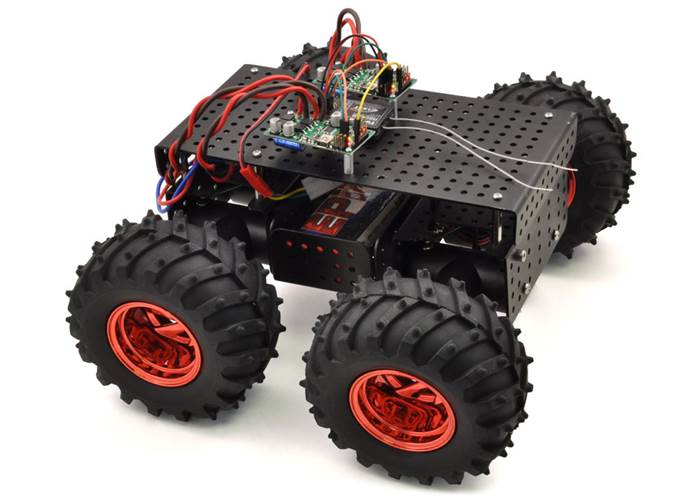
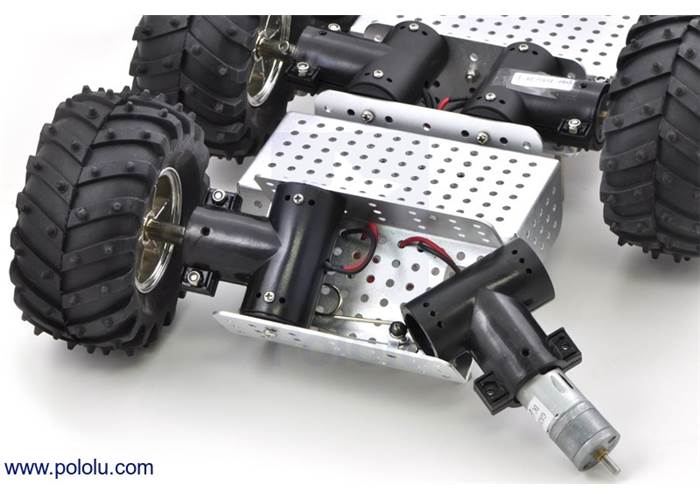
This rugged, 4-wheel-drive chassis from Dagu Electronics is a smaller version of the Wild Thumper 6WD chassis. It is designed to excel at traversing rough terrain, making it a great platform for any robot that needs to perform tasks in a complex outdoor environment. It features four powerful DC motors with brass brushes and 34:1 or 75:1 steel gearboxes that drive large (120mm diameter) spiked tires, and a unique “super-twist” suspension system acts to keep each wheel in contact with the ground for maximum traction, even when driving over uneven or bumpy surfaces. The suspension can be adjusted to suit different loads and conditions. The chassis is made from a 2mm-thick corrosion-resistant anodized aluminium plate, all of the nuts, bolts, and screws are stainless steel, and the brass fittings and suspension springs are nickel-plated.
When powered at 7.2 V, the version of the chassis with 34:1 gearboxes can reach a top speed of approximately 7 km/h (4.5 mph), and each motor has a stall torque of roughly 5 kg-cm (70 oz-in). At the same voltage, the version of the chassis with 75:1 gearboxes can reach a top speed of approximately 3 km/h (2 mph), and each motor has a stall torque of roughly 11 kg-cm (150 oz-in).
The chassis’ aluminium plate has 4mm holes spaced every 10mm, providing plenty of options when it comes to mounting your control electronics, sensors, and additional hardware. A compartment in the chassis has been designed to hold 7.2V sub-C battery packs (not included) that are commonly used in RC cars. Two such battery packs can fit in the compartment. The interior of the chassis also features convenient screw terminals for connecting your battery and motor driver leads. The motor leads are pre-connected to these screw terminals.

Side view of Dagu Wild Thumper 4WD chassis (silver version)

Two Pololu Simple Motor Controllers enable mixed RC-control of Dagu Wild Thumper 4WD all-terrain chassis
This is a differential-drive chassis, meaning that turning is accomplished by driving the motors on the two sides of the platform at different speeds. The two motors on each side of the robot are wired in parallel, so only two channels of motor control are required to get this chassis moving. The motors are intended for a maximum nominal operating voltage of 7.2 V (2V minimum), and each has a stall current of 6.6 A and a no-load current of 420 mA at 7.2 V. Since the motors will briefly draw the full stall current when abruptly starting from rest (and nearly twice the stall current when abruptly going from full speed in one direction to full speed in the other), we recommend a motor driver capable of supplying the 14A combined per-channel stall current of these motors at 7.2 V. We offer several motor controllers that meet these power requirements and make it easy to get this chassis moving:

Dagu Wild Thumper 4WD all-terrain chassis, silver

Dagu Wild Thumper 4WD all-terrain chassis, black (1)

Dagu Wild Thumper wheel 120x60mm (chrome) interior view

Dagu Wild Thumper wheel 120x60mm (metallic red) interior view
This chassis is available in two different colors (silver and black) and with two different gear ratios (34:1 and 75:1):
If you are looking for a bigger robot that is better at scaling inclines and traversing larger obstacles, please consider one of the Wild Thumper 6WD models:
The higher gear ratio version has a lower top speed but can produce greater torque. Note that while the Wild Thumper 4WD chassis includes four wheels, the wheels can be purchased in pairs for use as replacement Wild Thumper parts or as wheels for custom chassis. The wheels are available with metallic-red hubs and chrome-coloured hubs. We also offer the Wild Thumper gearmotors individually in a wide range of gear ratios (versions with integrated quadrature encoders are also available, though these will not work with the Wild Thumper chassis).
| Gear ratio: | 34:1 |
|---|---|
| Colour: | silver |
Customer Richard Nguyen has documented his work modifying the Wild Thumper chassis to use 25D motors with encoders in place of the chassis’s included motors.
Note: This is not an easy modification, and the chassis can be damaged if it is not done properly, so we generally recommend against it, and we can only provide very limited support for those who want to attempt it. The manufacturer did not intend for the chassis to be modified in this way, and we do not know how well such a modification will work out.