Designed to work with our 42 x 19mm wheel this quadrature encoder can be used to measure the speed and direction of your robots drive wheels. When used with the 42 x 19mm wheel the encoder provides a resolution of 48 counts per revolution corresponding to about 3mm of linear movement.
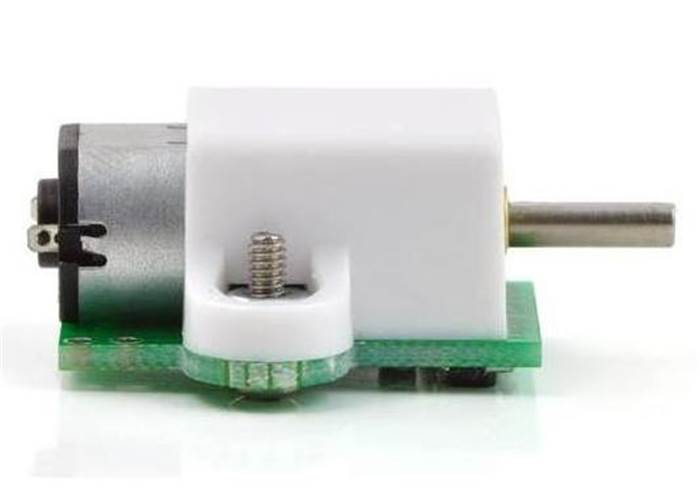
 These quadrature encoders are designed to work with the Pololu 42 x 19mm wheel and extended mounting bracket. With its small size the encoder mounts directly inside the wheel hub as shown and then to a robot chassis.
These quadrature encoders are designed to work with the Pololu 42 x 19mm wheel and extended mounting bracket. With its small size the encoder mounts directly inside the wheel hub as shown and then to a robot chassis.
The encoders are also available as a set with the wheels and gearmotor mounts.
Using wheel encoders enables the microcontroller to tell what is actually happening with the wheel rather than just feeding power to the motor and hoping for the best.
Operating voltage is 4.5 to 5.5V but can be recalibrated to 3.3V if required. Please see the Pololu page for details on 3.3V recalibration if required.
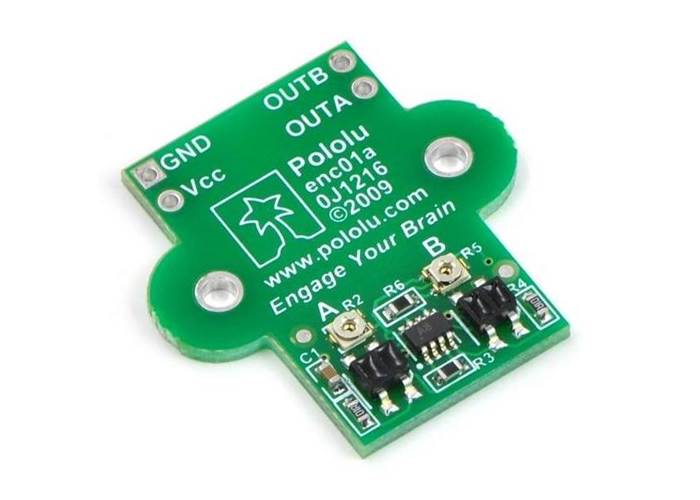
Two analog sensors on the encoder provide signals 90° out of phase which the encoder translates into reliable digital outputs with 48 counts per revolution which corresponds to about 3mm of linear movement with the 42 x 19mm wheels.
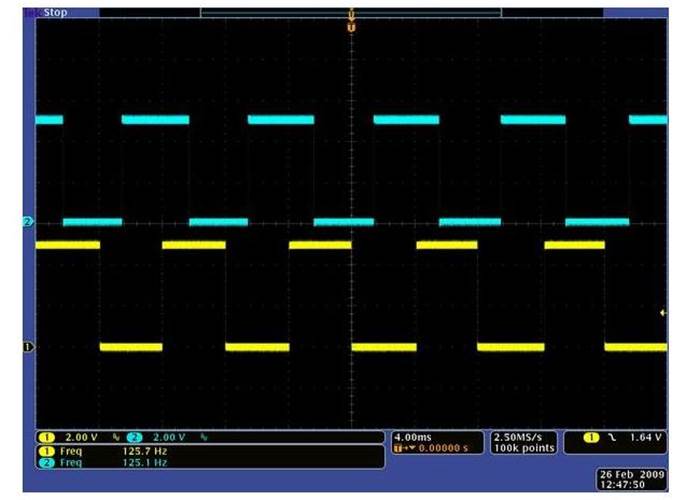
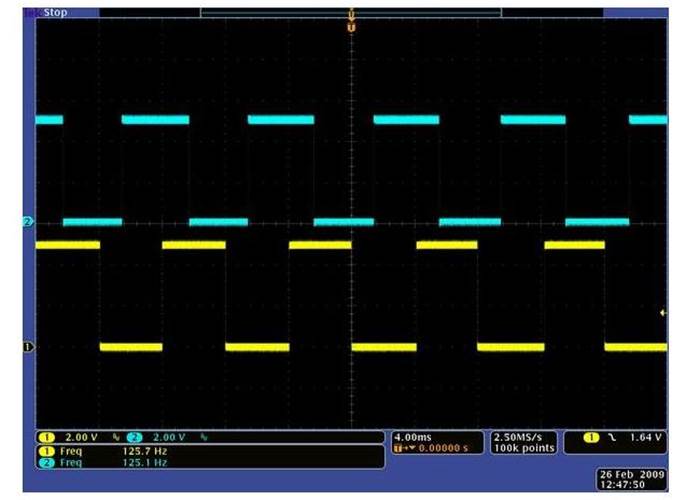
The clean digital output from the encoder can be seen below as captured using an oscilloscope with a wheel spinning at 630RPM.
The encoder is designed to fit within the outline of the extended micro gearmotor brackets that are in turn designed to work with the Pololu 42×19mm wheel and Pololu micro metal gearmotors, so most applications that can use that bracket should require little or no modifications, though it should be noted that the 1/16" thickness of the PCB will change the height of a chassis relative to the wheel. For convenience, we offer an encoder set that includes two encoders, a pair of 42×19mm wheels, and a pair of extended brackets; the micro metal gearmotors are sold separately. These encoders are only compatible with the 42×19mm wheel, extended micro gearmotor bracket, and micro metal gearmotors.
The power and output connections are brought out to the end of the PCB under the motor terminals so that wiring to all six terminals can be routed together. Wires can be soldered directly to the through-hole power and output pads, or some connectors with a 0.1" spacing.
The two outputs of the encoder are digital outputs that can be connected directly to digital input pins on most microcontrollers (inputs that can generate interrupts on change are recommended). With 48 state changes per revolution of the 42 mm wheel, a speed of 1 m/s (a bit over 3 feet per second) generates approximately 360 state changes per second. With two encoders used simultaneously, as is the case for most differential-drive robots, the encoders will require attention almost every millisecond. Decoding the encoder outputs should only take a few percent of the processing power of a high-performance microcontroller such as the Atmel AVR used in the Pololu Orangutan robot controllers, but the encoders might be difficult to use with slower microcontrollers without available external interrupts.
Pololu product page for details on 3.3V calibration
Pololu AVR C/C++ Library User’s Guide (Printable PDF: pololu_avr_library.pdf) Information about installing and using the C/C++ libraries provided for use with Pololu products.